
Tied Interface (TYPE2)
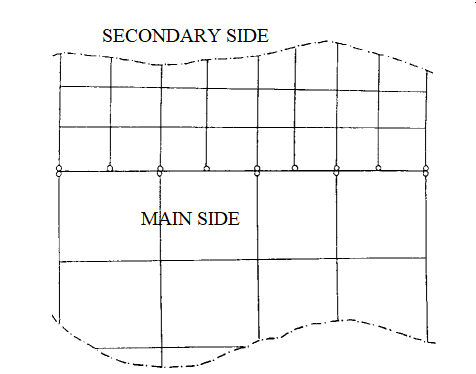
A main and a secondary surface are defined in the interface input cards. The contact between the two surfaces is tied. No sliding or movement of the secondary nodes is allowed on the main surface. There are no voids present either.
It is recommended that the main surface has a coarser mesh.
Accelerations and velocities of the main nodes are computed with forces and masses added from the secondary nodes.
Kinematic constraint is applied on all secondary nodes. They remain at the same position on their main segments.
Tied interfaces are useful in rivet modeling, where they are used to connect springs to a shell or solid mesh.
Spotweld Formulation
- Default formulation
- Optimized formulation
Default Spotweld Formulation
- Based on element shape functions
- Generating hourglass with under integrated elements
- Providing a connection stiffness function of secondary node localization
- Recommended with full integrated shells (main)
- Recommended for connecting brick secondary nodes to brick main segments (mesh transition without rotational freedom)
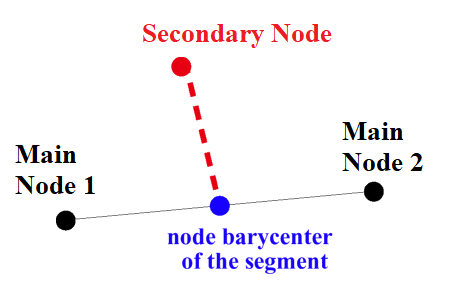
The mass of the secondary node is transferred to the main nodes using the position of the projection on the segment and linear interpolation functions:
- Denotes the position of the secondary point
- Weight function obtained by the interpolation equations
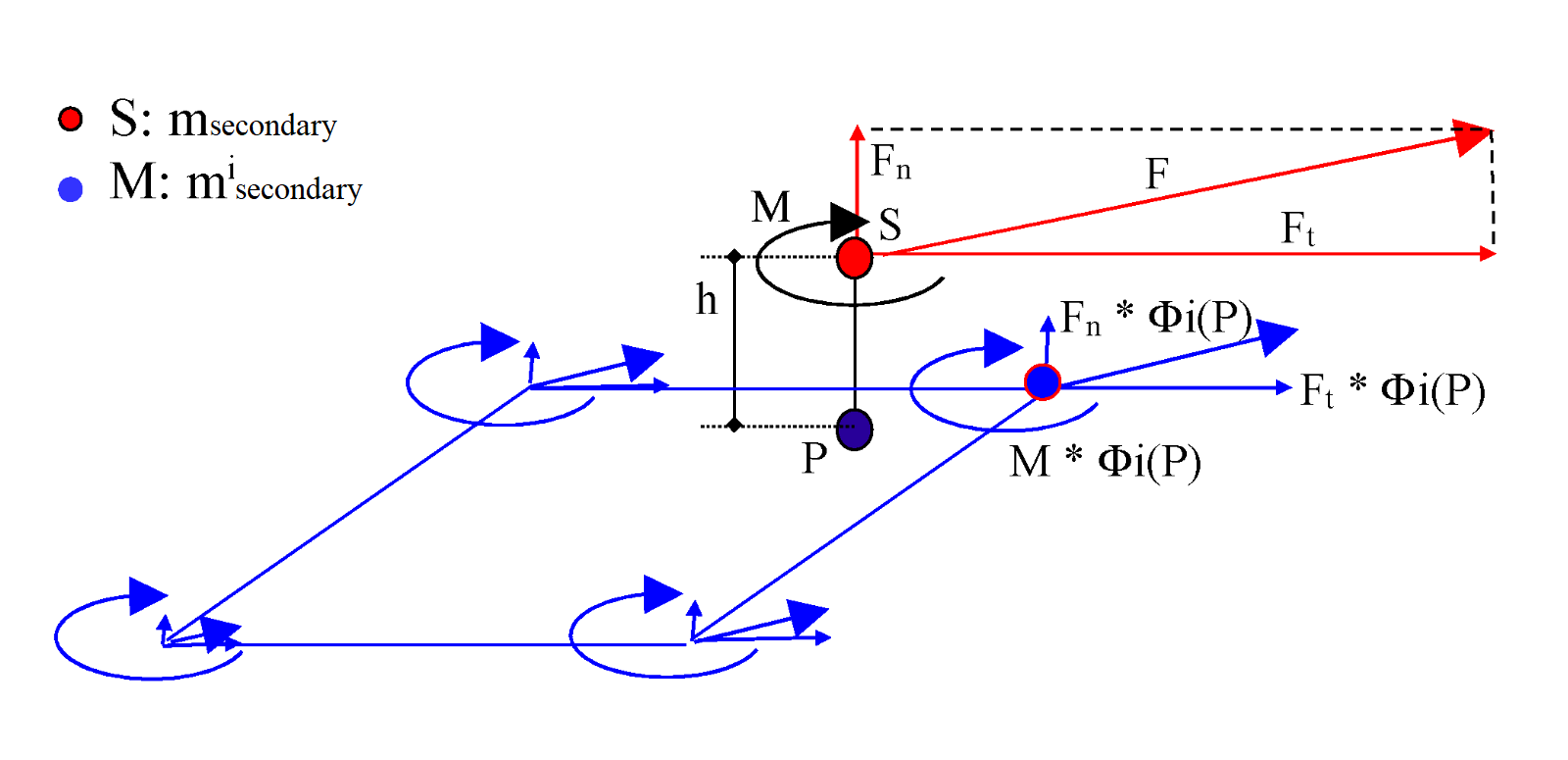
The inertia of the secondary node is also transferred to the main nodes by taking into account the distance between the secondary node and the main surface:
The term may increase the total inertia of the model especially when the secondary node is far from the main surface.
The stability conditions are written on the main nodes:
The dynamic equilibrium of each main node is then studied and the nodal accelerations are computed. Then the velocities at main nodes can be obtained and updated to compute the velocity of the projected point by:
The velocity of the secondary node is then obtained:
With this formulation, the added inertia may be very large especially when the secondary node is far from the mean plan of the main element.
Optimized Spotweld Formulation
- Based on element mean rigid motion (that is, without exciting deformation modes)
- Having no hourglass problem
- Having constant connection stiffness
- Recommended with under integrated shells (main)
- Recommended for connecting beam, spring and shell secondary nodes to brick main segments
This spotweld formulation is optimized for spotwelds or rivets.
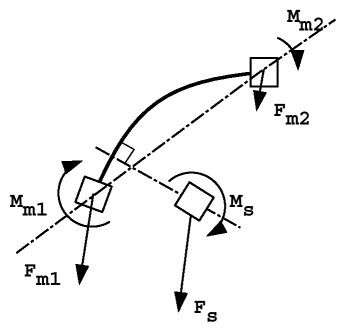
Forces and moments transfer from secondary to main nodes is described in Figure 6. The force applied at the secondary node is redistributed uniformly to the main nodes. In this way, only translational mode is excited. The moment is redistributed to the main nodes by four forces such that:
- Normal vector to the segment
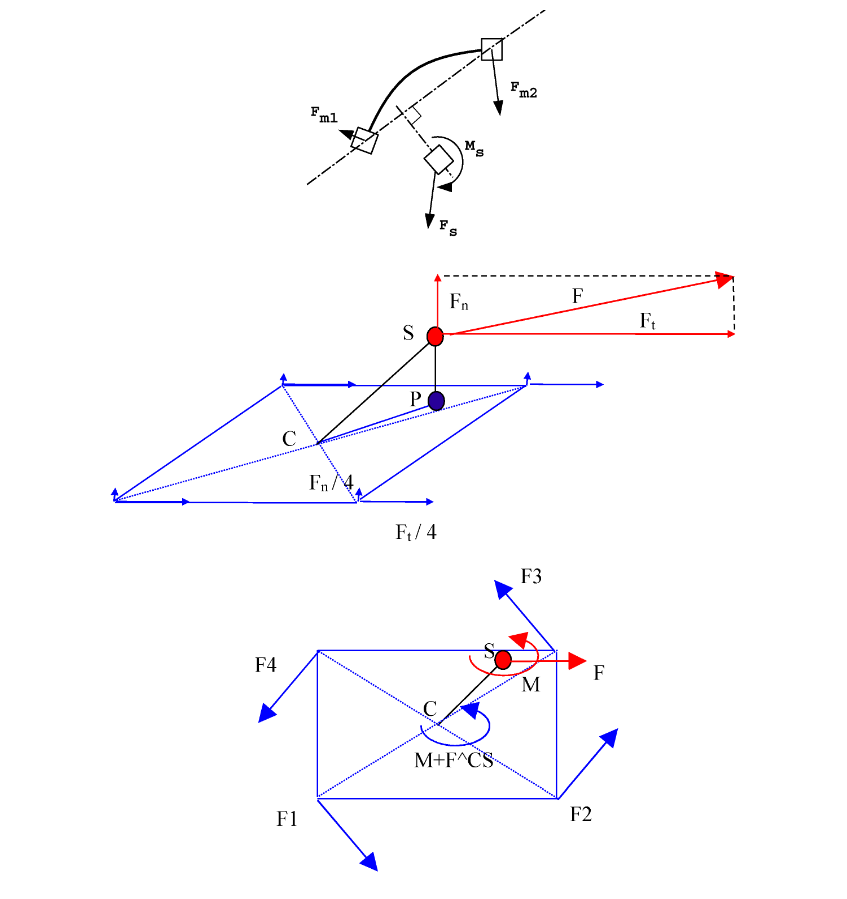
In this formulation the mass of the secondary node is equally distributed to the main nodes. In conformity with effort transmission, the spherical inertia is computed with respect to the center of the main element :
Where, is distance from the secondary node to the center of element. In order to insure the stability condition without reduction in the time step, the inertia of the secondary node is transferred to the main nodes by an equivalent nodal mass computed by:
Closest Main Segment Formulation
- Old formulation
- New improved formulation
Old Search of Closest Main Segment Formulation
When Isearch= 1, the search of closest main segment was based on the old formulation.
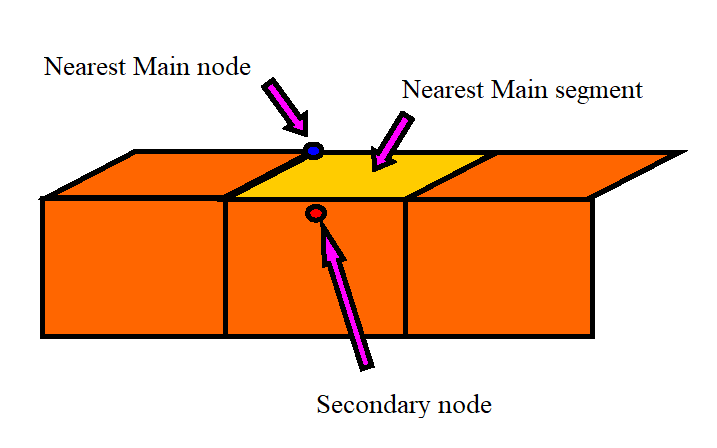
The distance between each main node in the box and the secondary node is computed.
The main node giving the minimum distance (dmin) is retained.
New Improved Search of Closest Main Segment Formulation
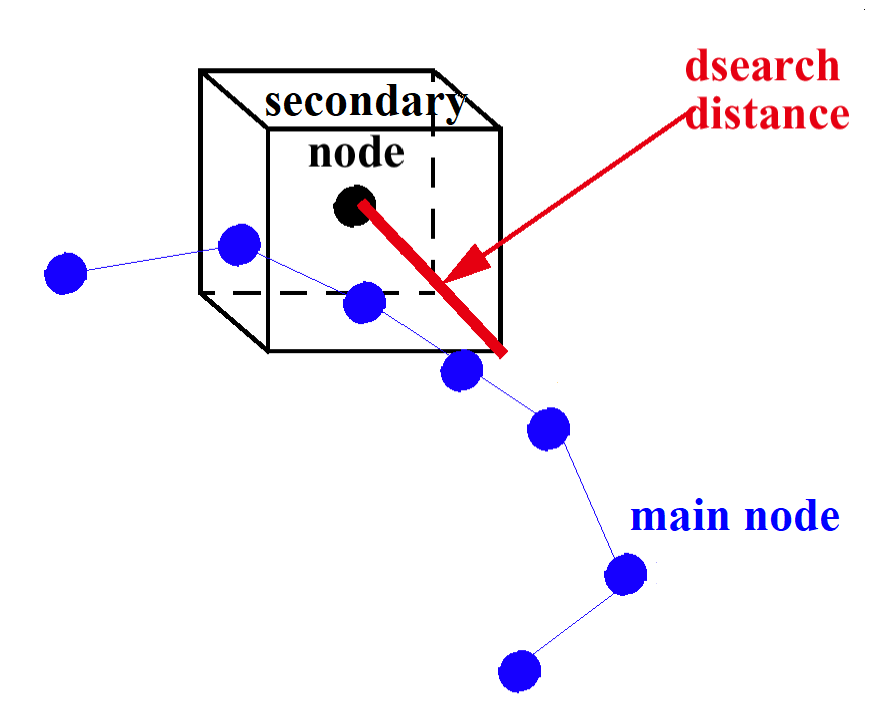
When Isearch=2, the search of closest main segment is based on the new improved formulation; a box including the main surface is built.
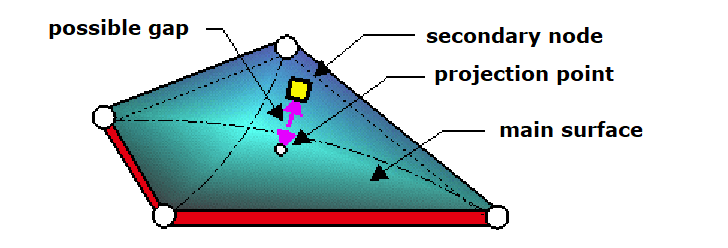
- The secondary node is an internal node for the main segment, as shown in Figure 10.The secondary node is projected orthogonally on the main segment to give a distance that may be compared with other distances. Select the minimum distance:
Figure 10. Orthogonal Projection on the Main Segment 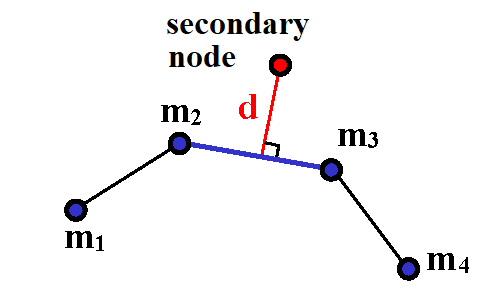
The segment that provides the minimum distance is chosen for the following computation.
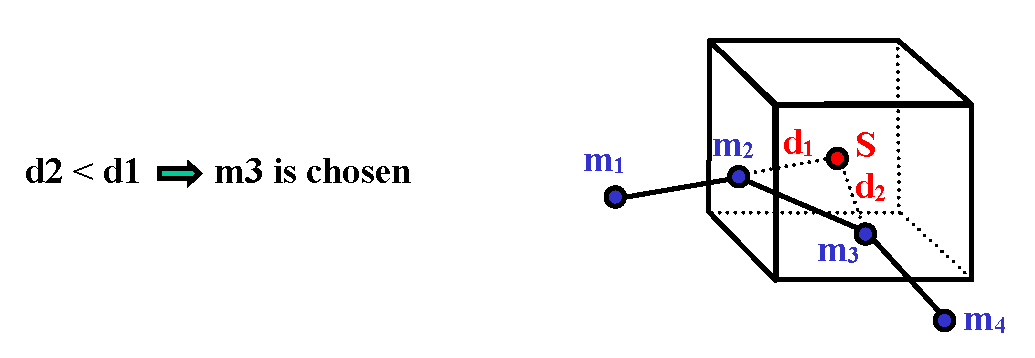
- The secondary node is a node external to the main segment, as shown in Figure 11.The distance selected is that between the secondary node and the nearest main node.
Figure 11. Nearest Main Node 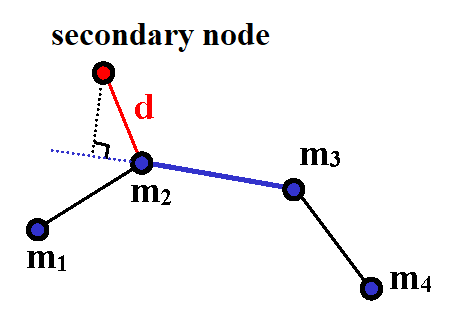
The segment is chosen using the selected node, (if the selected node belongs to 2 segments, one is chosen at random).