The question "how far can a body be dropped without incurring damage?" is frequently asked
in the packaging manufacturing for transportation of particles. The problem is similar in
the landing of an aircraft. It can be studied by an analytical approach where the dropping
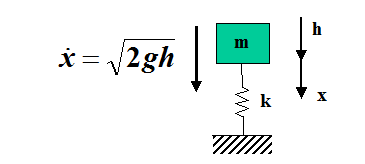
body is modeled by a simple mass-spring system (Figure 1). If is the dropping height, and the mass of the body and the stiffness representing the
contact between the body and the ground, the equation of the motion can be represented by a
simple one DOF differential equation as long as the spring remains in contact with
floor:Figure 1. Model for a Dropping Body
In this equation the damping effects are neglected to simplify the solution. The general
solution of the differential equation is written as:
Where, the constants A, B and C are determined by the initial conditions:
At ≥ , ,
Where, is the natural frequency of the system:
Introducing these initial solutions into Equation 3, the following result are
obtained:
The same problem can be resolved by the numerical procedure explained in this section.
Considering at first the following numerical values for the mass, the stiffness, the
dropping height and the gravity:
From Equation 1, the dynamic
equilibrium equation or equation of motion is obtained as:
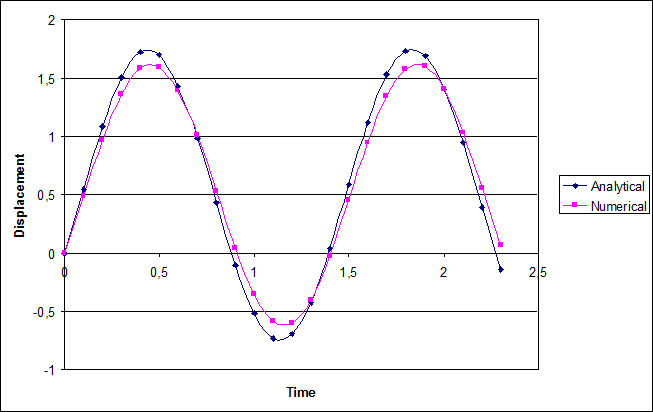
For the first time step the initial conditions are defined by Equation 3. Using a constant time
step the mass motion can be computed. It is compared to the
analytical solution given by Equation 5 in Figure 2. The difference between the two results shows the time
discretization error.Figure 2. Obtained Results for the Example