At each output time, the multibody simulation can write a comprehensive description
of the state of the system. Thus, a time history of system behavior is recorded in the
output files.
The output can include any combination of:
Displacements
Velocities
Accelerations
Reaction forces
Applied forces
User-defined variables
User-defined derived results
States for system modeling elements
Outputs from system modeling elements (such as linear transfer functions)
Plant inputs and outputs for the state matrices for a linearized model
State matrices corresponding to a set of plant inputs and outputs for a
linearized model
Eigenvalues and eigenvectors at specified operating points
After performing an analysis, the output of interest can be reviewed to understand the behavior
of the system. Very often, the output is used to animate a graphical representation of
the system so that an intuitive understanding of the behavior of the system can be
developed. Commercially available solutions usually offer a complete set of tools to
interpret the results (animation, x-y plots, output in numerical form, math operations
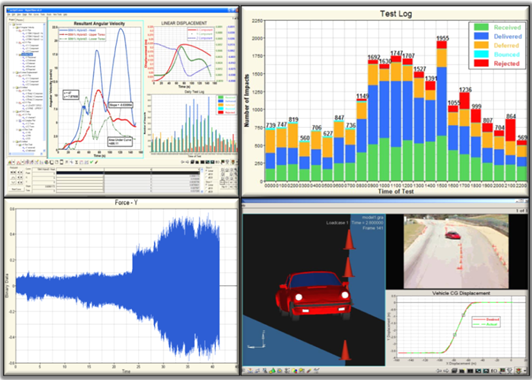
on the result sets, and so on). Figure 1 shows some of the
common visualization capabilities that are available in MBS software today.Figure 1. Common MotionSolve Outputs and Their
Visualization