Collisional Energy Tracking Model
The Collisional Energy Tracking Model is a contact model that allows tracking of the energy dissipated in collisions during a simulation.
The output of the model is stored in three counter custom properties that track collision counts and energy losses for both Particle-Particle and Particle-Geometry collisions.
- Collisional Normal Energy Loss, which is the sum of all energy losses arising from damping the contact normal forces
- Collisional Tangential Energy Loss, which is the sum of all energy losses arising from damping the contact tangential forces
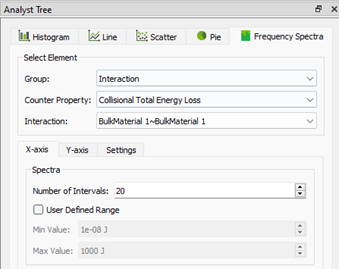
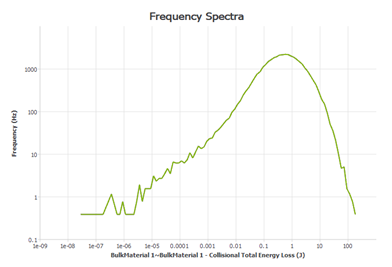
- Collisional Total Energy Loss, which is the sum of all energy losses arising from damping the contact forces and contact torques
You can plot the counter custom properties as a spectrum of energy loss in EDEM Analyst. The results are maintained per material interaction.
Calculating Particle-Particle Energy Loss
For particles p1 and p2, the work done during each time step on p1 by contact with p2 is given by:
- Wn is the linear work done that is associated with the normal force during one Time Step
- Wt is the linear work done that is associated with the tangential force during one Time Step
- Wang is the angular work done that is associated with the additional torques during one Time Step
- Wtot is the total work done during one Time Step
- v1cp , v2cp are the velocities of p1 and p2 at contact point rcp, respectively
- Fn, Ft are the normal and tangential components of the contact force, respectively
- r1, r2, and rcp are the positions of p1, p2, and the contact point, respectively
- τ1, τ2 are the additional torques acting on p1 and p2, respectively, which are calculated in addition to the torque resulting from the contact force (for example, rolling friction)
- Δt is the duration of a single Time Step
When two particles first come into contact, the model begins the process of summing the work done by the contact on the particles at each Time Step, for each of the three work types. The calculated energy loss is the inverse of the work done, as defined earlier. When the contact is completed, the total energy loss over the duration of the contact is then logged to a corresponding histogram bin or a custom counter property bin.
Calculating Particle-Geometry Energy Loss
The model works in a similar fashion for Particle-Geometry contacts, with the Geometry element replacing particle p2 in the stated theory.
Using the Collisional Energy Tracking Model
- Add the model to the Physics of a given EDEM simulation.
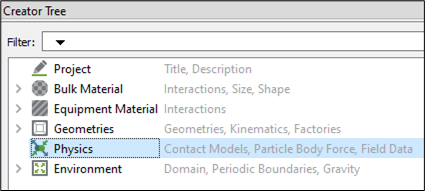
- In the Creator Tree, select Physics.
- Select Particle to Particle and/or Particle to Geometry from the Interaction dropdown list.
- Click Edit Contact Chain at the lower section of the
Physics panel.

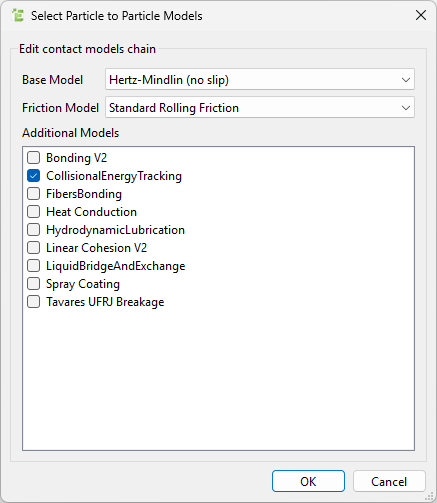
- Under Additional Models, select the
CollisionalEnergyTracking checkbox.
- Select the model and click the
 icon in
the lower-right section of the Physics panel to configure it.
icon in
the lower-right section of the Physics panel to configure it.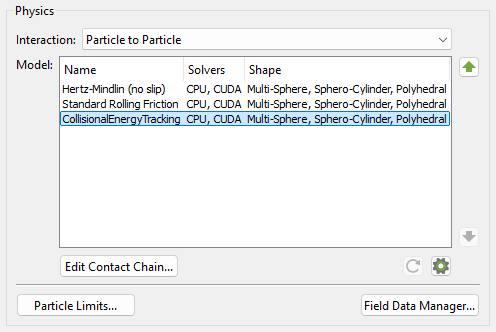
- In the CollisionalEnergyTracking Parameter Editor
dialog box, specify values for the following:
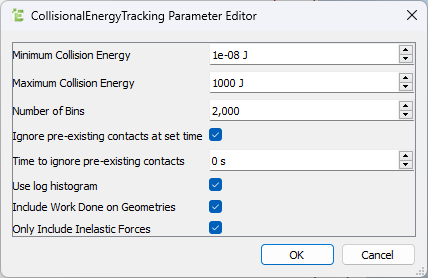
For Specify Minimum Collision Energy Indicates the lower bound of the energy loss histogram. This is a lower bound on the values that will be stored in the three counter custom properties. Maximum Collision Energy Indicates the upper bound of the energy loss histogram. This is an upper bound on the values that will be stored in the three counter custom properties. Number of Bins Indicates the number of bins to use in the energy loss histogram. This corresponds to the number of bins in each of the three counter custom properties. A larger value gives a better resolution but also potentially increases the noise of the data, meaning further post-processing may be required. Ignore pre-existing contacts at set time Indicates that contacts existing at the corresponding time will not be included in any calculations of the model, if enabled. This is useful if an exported deck with pre-existing contacts has this model added to it. Having this option enabled prevents the inclusion of data coming from collisions where only part of the collisional energy loss is summed. Time to ignore pre-existing contacts Indicates the time at which contacts will not be included if the previous setting is enabled. This should typically be the simulation start time. Use log histogram Sets the spacing of the bins to be distributed logarithmically, as opposed to linearly. Enabling this option is highly recommended. However, if you want to analyze negative energy loss values, a linear histogram with a negative minimum collision energy can be used instead. The energy loss values cannot be negative while this option is enabled. Include Work Done on Geometries If enabled, Particle-Geometry contacts are treated as identical to Particle-Particle contacts. If disabled, work done on the Geometries is ignored (the calculation is done as if the Geometries always have zero velocity.) With this option enabled, a steady-state system driven by Geometry motions and fixed particle count will show a net loss due to collisions, due to energy input from the Geometry kinematics being dissipated in the collisions in the system. With this option disabled, the Particle-Geometry collisions will exhibit large negative losses and the collisional energy loss as a whole will sum to zero in the steady state (it may be necessary to disable Only Include Inelastic Forces to achieve this. Only Include Inelastic Forces If enabled, only inelastic forces are used in the calculations. For more information about how they are used in calculations, see Potential Issues with Energy Loss Calculation. Note: The default values and selections are considered an appropriate starting point for most simulations. - Click OK.
Post Processing
- Collisional Normal Energy Loss
- Collisional Tangential Energy Loss
- Collisional Total Energy Loss
Potential Issues with Energy Loss Calculation
To compute the energy loss in a collision it is possible to use the full contact force and torque or to just use the inelastic part, as computed by contact models. The forces returned by the EDEM contact models allow for setting a damping force separately to the total force and models should do this in general. Assuming an infinitesimal Time Step and a correct separation of these forces by the contact models, the results should be the same in theory, because the total work done by an elastic force should sum to zero over the life of a contact.
In general, due to the use of a non-zero Time Step, this is not the normal behavior. In some cases, it may not be possible to separate the forces correctly. For example, using the Hertz-Mindlin model with a coefficient of restitution of one (no viscous damping) and an infinite coefficient of friction (no loss from sliding) the inelastic part of the force will always be computed as zero in the EDEM contact model chain. However, the tangential spring is not energy conserving because the stiffness depends on the normal overlap. For example, if a contact is created, then the normal overlap increases, and then the tangential overlap increases. Further, the normal overlap decreases to zero without the tangential overlap decreasing, and energy will be absorbed by the tangential spring without the damping force being computed by EDEM.
The net result of is that if the total force is used, some negative loss values may be obtained, although they can usually be ignored. Typically, only inelastic forces will provide a better representation of where energy is being dissipated in a simulation. Using only inelastic forces is the default setting. However, you can disable this checkbox, meaning that the total forces will be used in the energy loss calculations instead.