
运行设置
使用“运行设置”工具更改默认运动运行设置。
您可以控制运动仿真的运行时间、结果输出的帧数量、分析类型以及是否包含重力。
位置:“运动”功能区,“运行”图标组,“分析运动”图标
将光标移动到“分析运动”工具上,点击出现的 ![]() 卫星图标,即可更改运动分析的运行设置。
卫星图标,即可更改运动分析的运行设置。
编辑运动运行设置
使用“运行运动分析”窗口更改运动运行分析设置。
-
将鼠标悬停在分析运动工具上并点击运行设置
 卫星图标。
提示: 要查找并打开工具,按 Ctrl+F。更多信息,请见查找和搜索工具。
卫星图标。
提示: 要查找并打开工具,按 Ctrl+F。更多信息,请见查找和搜索工具。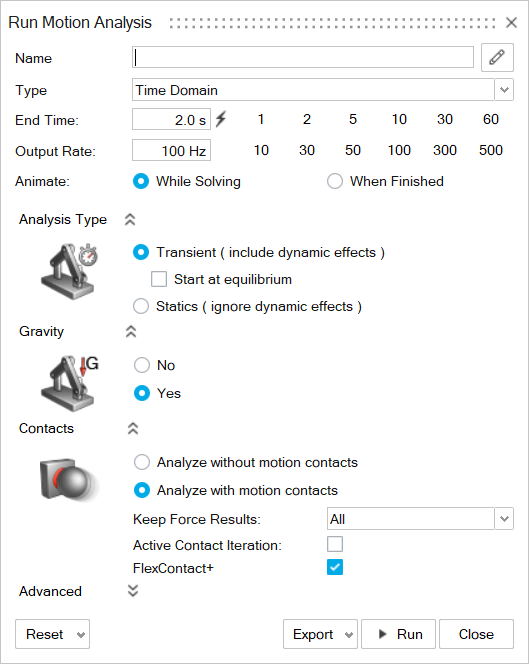
- 可选:输入分析的名称。
- 可选:输入分析的说明。将鼠标悬停在图表管理器中相应的运行记录文件上时,将以工具提示的形式显示说明。
- 在类型下,选择时域来运行关于时间的运动分析;或者选择特征分析来运行特征模式分析。(窗口中的选项将根据该选择而改变。)
- 在运行运动分析窗口中根据需要更改基本设置。
- 点击高级锯齿形图标,更改与求解器设置、模型检查及绘图相关的高级选项。
- 点击运行开始运动分析。第二次点击按钮停止仿真。
| 要 | 则 | 注意 |
|---|---|---|
| 重用以前的说明进行新的运动分析 | 点击  ,然后点击使用上一个说明图标 ,然后点击使用上一个说明图标  。 。 |
|
| 在图表管理器中查看您的运动分析的说明。 |
|
|
| 导出包括分析设置的运动模型,格式为 MotionView 文件 (.mdl) 或 MotionSolve py 文件 (.py)。 | 使用导出按钮。 | 在导出时选择单位,但最好在“偏好设置”中设置首选模型单位,然后在导出之前先运行模型。 |
| 恢复您模型的所有默认运动分析设置 | 使用重置 > 默认选项。 |

基本设置
使用“运行运动分析”窗口中的选项定义运动分析。
- 名称
- 为运动分析运行输入一个名称。
- 说明
- 点击
 以输入分析的说明。将鼠标悬停在图表管理器中相应的运行记录文件上时,将以工具提示的形式显示说明。
以输入分析的说明。将鼠标悬停在图表管理器中相应的运行记录文件上时,将以工具提示的形式显示说明。 - 类型
- 选择时域来运行关于时间的运动分析;或者选择特征分析来运行特征模式分析。
- 结束时间
- 结束时间表示运行运动仿真所需的时间。要再增加 10% 的时间,请在按住 Ctrl 键的同时点击计算结束时间。这对查看轮廓结束时的模型运行状态很有帮助。
- 输出率
- 输出率控制结果输出中的帧数量。数字大则表示结果更为平滑、更有连续性,但动画效果较慢。
- 动画
- 该选项控制求解时是否为模型添加动画效果。如果选择完成后,运行将完成得更快。如果运行成功,按空格键或点击动画工具栏上的“播放”按钮,即可回放动画。
- 分析类型(仅针对“时域”显示)
- 运动分析可为瞬态、静力学或两者皆有。
- 瞬态分析用于将动态效果包含于依赖时间的运动仿真中。启用平衡时开始,首先从平衡解开始。
- 静力学分析用于决定您机构的静力平衡位置。这种分析类型要忽略所有速度和阻尼项。这有助于您分析载荷,而无需将动态效果包含在内。
- 操作点(仅针对特征分析显示)
- 操作点是进行特征分析的系统的位置和方向。查看特征分析设置,了解其他信息。
- 重力
- 该设置用于将重力包含或排除于运动分析中。要包含重力,首先必须使用“重力”工具施加重力加速度。
- 接触
-
- 分析(不包含运动接触):选择该选项将运动接触从运动分析中排除。
- 分析(包含运动接触):选择该选项将运动接触包含在运动分析中。
-
保持力的结果是一个全局设置,用于控制运动分析后存储在模型中的接触力数量。选择所有、仅区域或无。
“仅区域”选项与“力浏览器”中“总力”的“位于区域”设置相对应。如果您选择“仅区域”或“无”,请注意,在使用“力浏览器”为运动结果添加动画效果时,您将仅能看到您针对给定接触所指定的内容等级。例如,如果您选择“仅区域”,则仅能看到单独(未相加的)力向量。同样,如果您选择“无”,则不会看到任何接触产生的力向量。
注: 如果您希望覆盖“保持力的结果”的全局设置并单独处理运动接触,可以在“属性编辑器”中实现。 - 活动接触迭代在涉及零件之间接触的某些模型中,力结果的质量可能取决于求解的偏导数矩阵(雅可比矩阵)的更新频率。在可能存在较大时间步长或相对于接触阻尼具有较高接触刚度的模型中,接触力可能会出现噪声。
打开 ACI 可随着每个输出步骤更新雅可比矩阵,从而帮助求解收敛,得到更平滑的结果。ACI 对接触事件的解决方案进行了额外改进,有助于减少因接触力引起的噪音,并在整体上提供更准确的力结果。
根据应用类型的不同,ACI 可能会提高速度和/或精度。在某些接触模型中,您可能会获得更准确的结果和更短的运行时间。然而,在某些模型中,使用 ACI 也可能略微增加仿真时间。
默认情况下,ACI 在 2022 及更高版本创建的模型中是打开的,而在 2022 或更早版本中创建的模型中是关闭的。
- FlexContact+:在运动接触中使用柔性体时,通过执行更全面和更具预测性的分析来考虑接触界面处的应力或应变。您可以对刚性/柔性和柔性/柔性零件之间的接触进行建模。
高级设置
点击高级旁的锯齿形图标 ![]() ,显示与求解器设置、模型检查及绘图相关的高级选项。
,显示与求解器设置、模型检查及绘图相关的高级选项。

求解器设置
- 最大步长
- 积分允许的最大步长。
- 最大积分阶次
- 这是积分允许的最大阶次。默认值为5;更高阶次准确度更高,但稳定性更低。在一些应用中,如间歇性接触,用户可能会想覆盖默认值并将其设置为更小的值,比如 2(或 1)。
- 积分容差
- 该容差代表每个积分步进的最大绝对错误。
- 积分 DAE 指数
- 这是求解器的微分代数方程 (DAE) 指数。选项为 I3(默认)或 SI1。在给定积分容差的情况下,选择 SI1 可能会提高精度,但也可能会增加运行时间。
- 自动输出
- 为图表所创建的内容(所有、为零件排除、仅测量、无)以及要使用的参考帧(全局、本地)提供选项。
- 保存最后一次运行
- 关闭该选项可以在保存模型时将运动结果排除,从而缩小 .stmod 文件的大小。
- 生成动画文件
- 生成动画文件时,您可以选择包含所有数据,排除接触数据或无。启用后,MotionSolve 将在运动分析成功结束时将 run.h3d 文件写入“运行记录”文件夹。该文件可用于在 HyperWorks(通过 HyperView)中或通过独立的 HyperView 播放器播放动画。如果模型有运动接触,则排除接触数据设置对于减小 H3D 文件的整体尺寸很有用,而默认设置(无)可防止 .h3d 文件因进行运动分析而被写入。
- 日志文件
- 选择“保留”以保留运行中产生的与运动相关的求解器文件。选择“丢弃”以自动删除运行完成后产生的文件。根据需要,点击“立刻删除”按钮即可删除日志文件。
模型检查
- 传感器
- 提供使用哪种模型检查传感器(所有、排除铰接变形、无)的选项。
- 允许变形
- 为铰接指定允许的变形 + 或 - 容差值。默认值为 1 mm。
- 设置警告
- 点击
 管理警告消息。
管理警告消息。 如果您在选择了运行仿真时不再显示此选项后改变了主意,这就非常有用。
如果您在选择了运行仿真时不再显示此选项后改变了主意,这就非常有用。
连接器
使用这些设置在全局级别覆盖连接器的默认运行状态。默认情况下,所有铰接都表现为柔性。当以下选项设置为“柔性”,铰接的运行状态为线性轴套模型。设置为“刚性”时,铰接处于理想状态,不会变形。当该选项设置为“虚拟”时,它与刚性铰接非常相似,但具有“软约束”行为,对于避免冗余铰接很有用。
- 铰接状态
- 铰接和滑动铰接的默认设置为“柔性”。
- 铰接补块状态
- 共享几何特征的零件上的铰接,其默认设置为“柔性”。
- 固定约束状态
- 固定约束的默认设置为“刚性”。
- 自动计算速率
- 默认状态下,自动确定全局速率(如下所示)。禁用该选项以输入您自己的速率。
如果以上任何运行状态设置为“柔性”,以下全局速率适用。(虚拟和刚性铰接不适用速率。)
- K:刚度率
- C:阻尼率
- KT:扭转刚度率
- CT:扭力阻尼率
注: 要控制单个铰接的运行状态而非更改以上全局连接器设置,请使用“属性编辑器”中的“运行状态”属性。
快捷键
| 要 | 则 |
|---|---|
| 中止运行 | 按 Esc 键 |