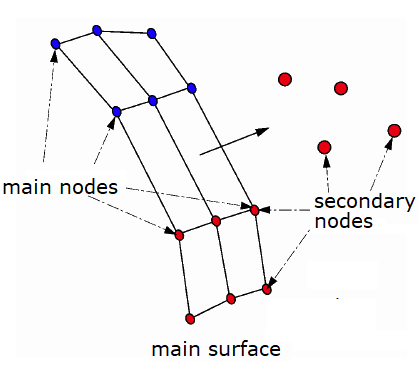
This interface is used to simulate the impact between a main surface and a list of secondary
nodes., as shown in Figure 1.
The penetration is reduced by the penalty method.
Another method is possible: Lagrange multipliers. But spatial distribution force is not smooth and induces hourglass deformation.
This interface is mainly used for:
Simulation of impact between beam, truss and spring nodes on a surface.
Simulation of impact between a complex fine mesh and a simple convex surface.
A replacement for a rigid wall.
Limitations
The main limitations of TYPE5 interface are:
The main segment normals must be oriented from the main surface towards the secondary
nodes.
The main side segments must be connected to solid or shell elements.
The same node is not allowed to exist on both the main and secondary surfaces.
In certain situations, the search algorithm does not identify the correct node to
surface impacts.
It is recommended that the main surface mesh be regular, with a good aspect ratio and that
a small or zero gap be used to detect penetration.Figure 1. Surface 1 (Nodes) and Surface 2 (Segments)
Computation Algorithm
The computation and search algorithms used for TYPE5 are the same as for TYPE3. Refer to
Computation Algorithm.
Interface Stiffness
When two surfaces contact, a massless stiffness is introduced to reduce the
penetration's nodes of the other surface into the surface.
The nature of the stiffness depends on the type of interface and the elements involved.
The introduction of this stiffness may have consequences on the time step, depending on the
interface type used.
For a TYPE5 interface, the spring stiffness is determined by main and secondary sides. The stiffness
scaling factor default value (and recommended value) is 0.2.
For a soft main surface material and stiff secondary surface, the stiffness scaling factor
should be increased by the elastic modulus ratio of the two materials.
The calculation of the spring stiffness' is the same as in a TYPE3 interface.
If a segment is a shell as well as the face of brick element, the shell stiffness is
used.
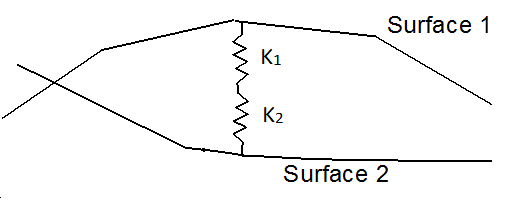
The overall interface spring stiffness is determined by considering two springs acting in
series.Figure 2. Interface Springs in Series
The equation for the overall interface spring stiffness is:
Where,
Stiffness scaling factor. Default is 0.2.
Surface 1 Stiffness
Surface 2 Stiffness
Overall interface spring stiffness
The scale factor, , may have to be increased if:
or
The calculation of the spring stiffness for each surface is determined by the type of
elements.
TYPE5 interface allows sliding between contact surfaces.
Coulomb friction between the surfaces is modeled. The input card requires a friction
coefficient. No value (default) defines zero friction between the surfaces.
The friction computation on a surface is the same as for TYPE3 interface. Refer to Interface Friction.
Darmstad and Renard models for friction are also available:
Darmstad Law:
Renard Law:
Where,
Possibility of smoothing the tangent forces via a filter:
Where, the coefficient depends on the Ifiltr flag value.
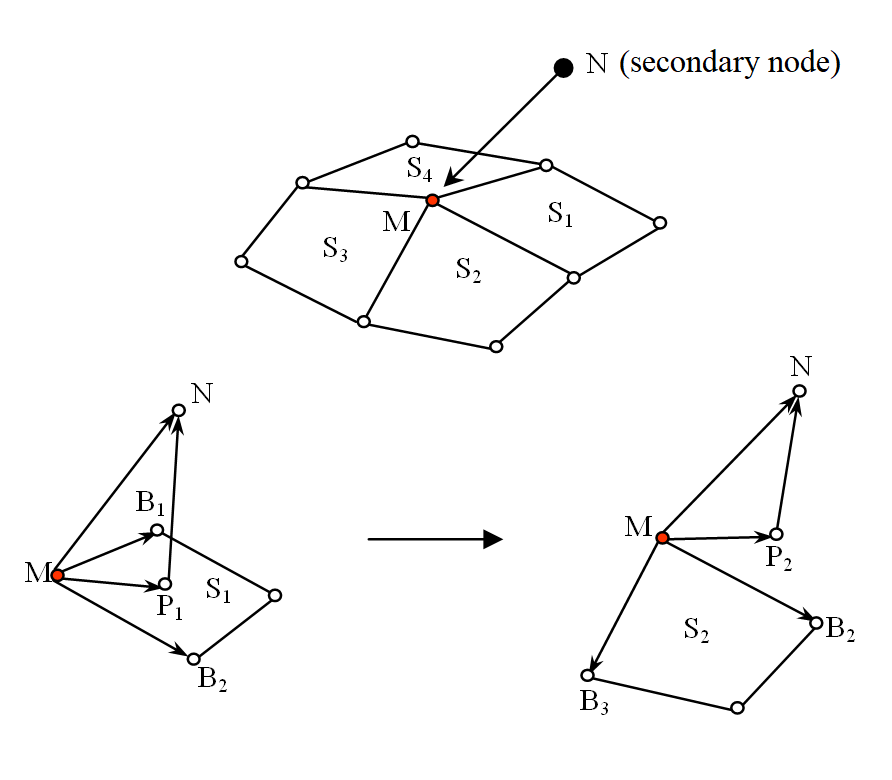
The Radioss Starter and Engine use different methods to
determine the closest main node to a particular secondary node.
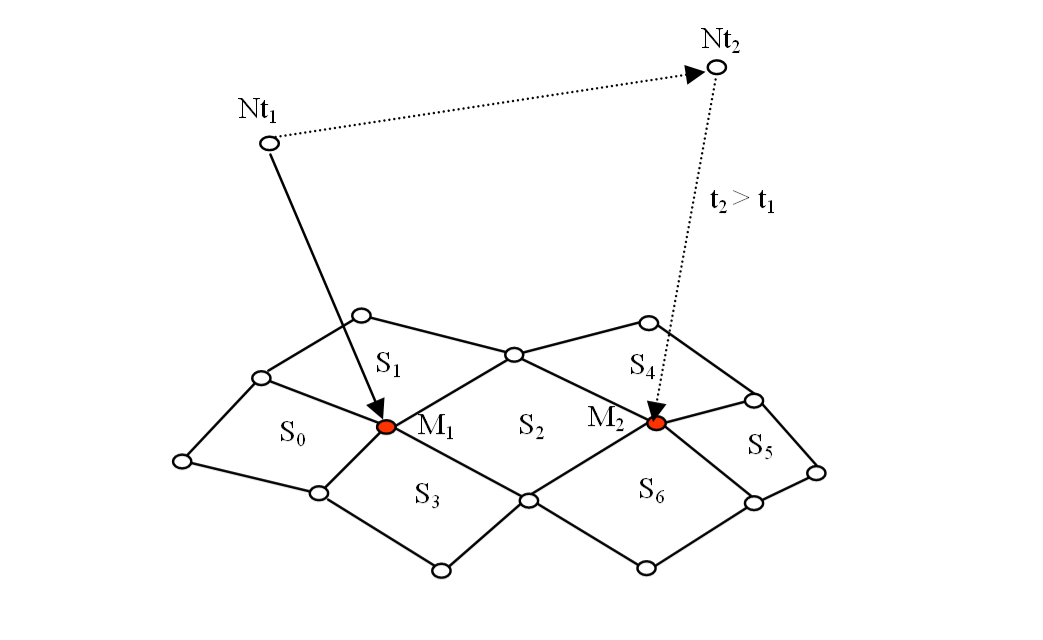
The Starter searches for the main node with the minimum distance to the particular
secondary node. The Engine carries out the following algorithm, referring to Figure 3.Figure 3. Search Method
Get the previous closest segment, , to node at time .
Determine the closest node, , to node which belongs to segment .
Determine the segments connected to node (, , and ).
Determine the new closest main node, , to node at time . The new main node must belong to one of the segments , , or .
Determine the new closest main segment (, , and ).
The Starter CPU cost is calculated with the following equation:
CPUstarter = a x Number of Secondary Nodes x Number of Main Nodes
The Engine CPU cost is calculated with the following equation:
CPUengine = b x Number of Secondary Nodes
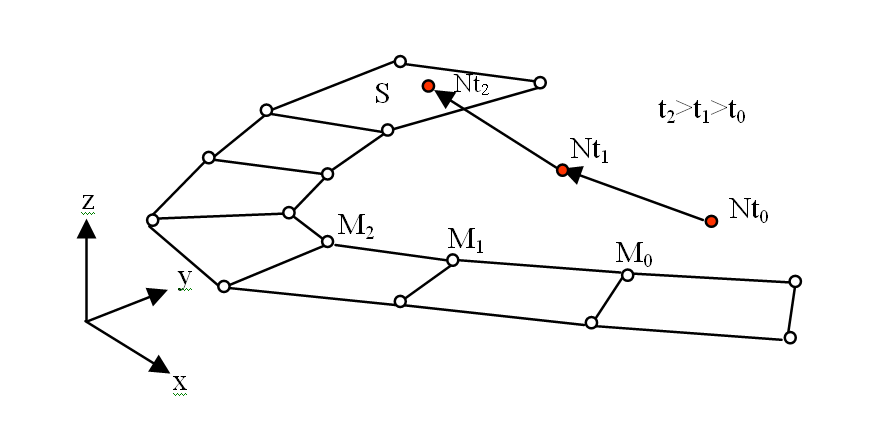
The algorithm used in the Engine is less expensive but it does not work in some special
cases. In Figure 4, if node is moving from to and then to , the closest main nodes are and . When the final node movement to is taken, the impact on segment will not be detected since none of the nodes on this segment
are considered as the closest main node.Figure 4. Undetected Impact
Detection of Closest Main
Segment
The closest main segment to a secondary node , shown in Figure 5, is found by determining a reference quantity, .Figure 5. Closest Main Segment Determination Method
The value for segment
is given by:
Where,
Projection of on plane (, , )
and
Tangential Surface Vectors along segment edges.
The value for segment is given by:
Where,
Projection of on plane (, , )
The same procedure is carried out for all main segments that node is connected to.
The closest segment is the segment for which is a minimum.
In some special cases (curved surfaces), it is possible that:
All values of are positive.
More than one value of is negative.
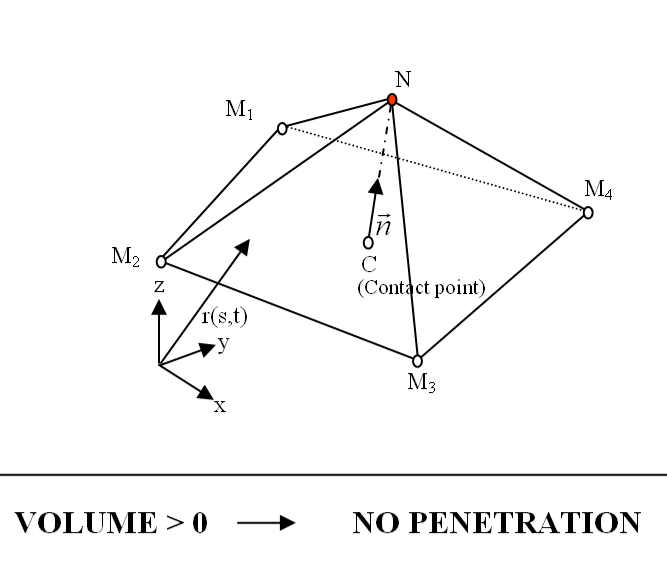
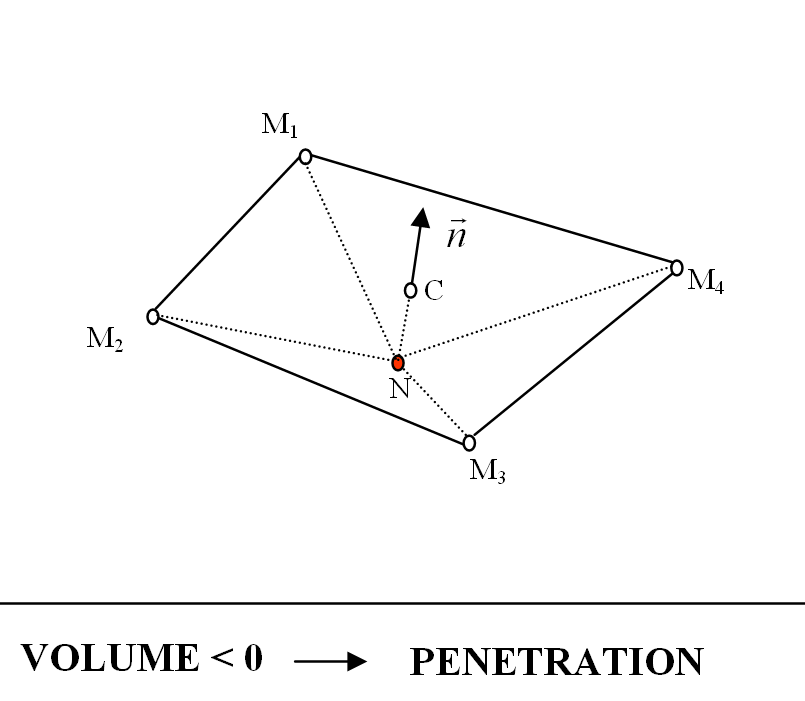
Detection of Penetration
Penetration is detected by calculating the volume of the tetrahedron made by secondary node and the main nodes of the corresponding main segment, as shown
in Figure 6.
For a given normal , the sign of the volume shows if penetration has occurred.Figure 6. Tetrahedron used for Penetration Detection Figure 7. Negative Volume Tetrahedron - Penetrated Node
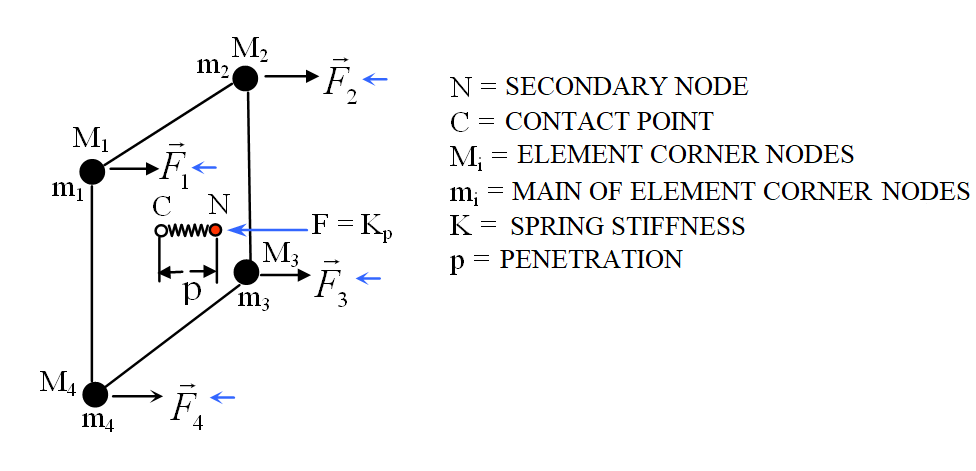
Reduction of Penetration
The penetration, , is reduced by the introduction of a massless spring between
the node, , and the contact point, .Figure 8. Forces Associated with Penetration
The force applied on node in direction is:
Where, is the interface spring stiffness.
Reaction forces , , and are applied on each main node (shown in Figure 8) in the opposite direction to the penetration force,
such that:
Forces ( = 1, 2, 3, 4) are functions of the position of the contact
point, . They are evaluated by:
Where,
or more simply:
Where,
Standard linear quadralateral interpolation functions
and
Isoparametric coordinates contact point
The penalty method is used to reduce the penetration. This provides: