DPM Time-Variant
Compute radio coverage in a factory hall using the DPM.
Model Type
This model consists of rotating robots, moving cars, and a fixed transmitter located between the robots.
Sites and Antennas
Only one transmitter is used at a height of 2.5 m located between the robots. The antenna operates at 2.4 GHz, and the radiation pattern is omnidirectional.
Computational Method
This project uses a semi-deterministic prediction model (dominant path model) to compute the power distribution in the area. This model does not compute multipath propagation, but only the dominant path to each receiver location. As a result, for large scenarios, this computation method takes a very short time compared to ray optical computation methods.
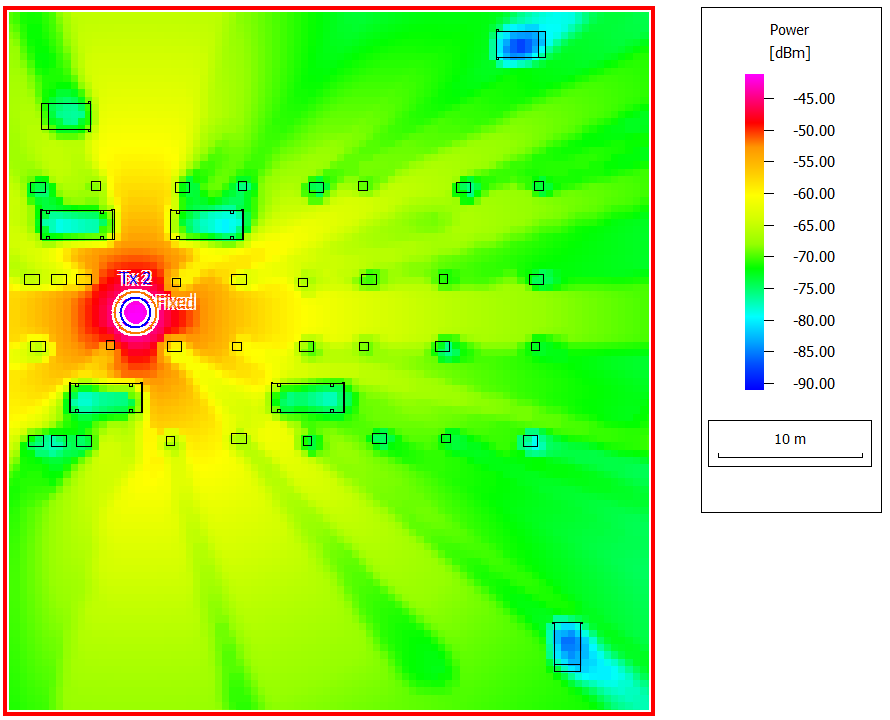
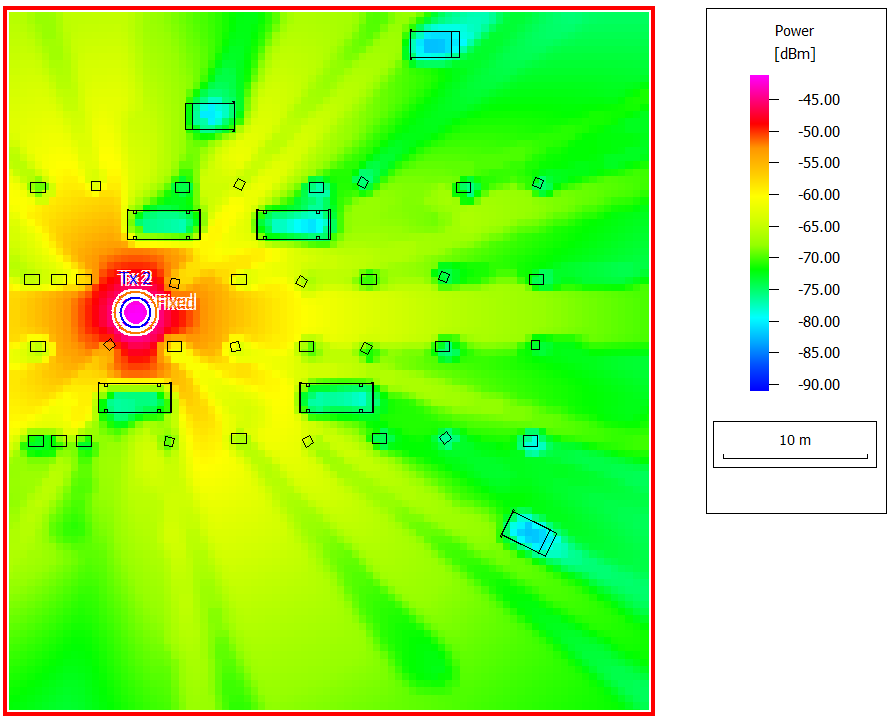
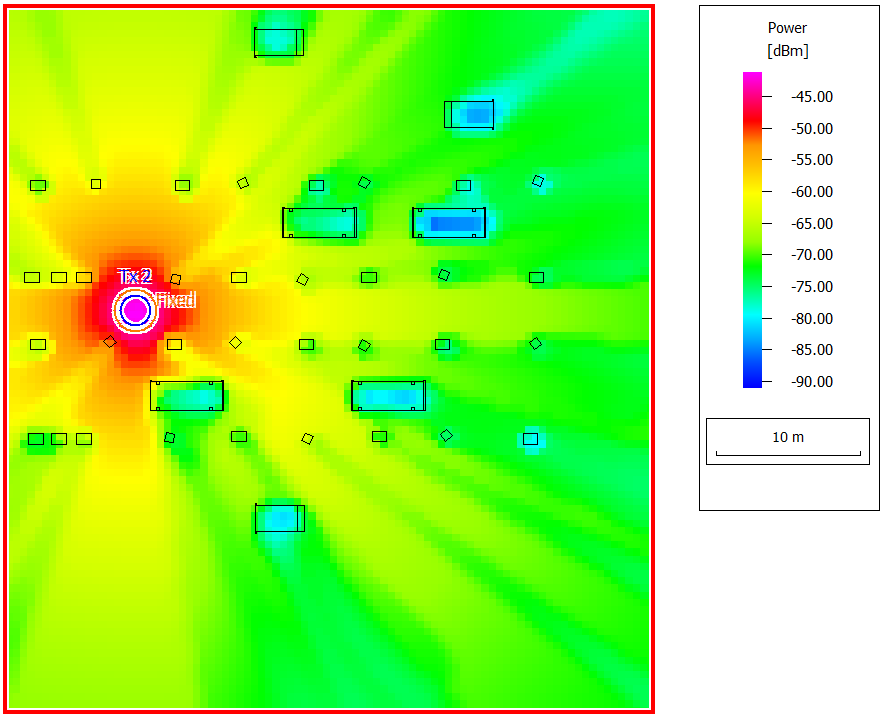
Results
The results are computed for 15-time samples from 0 to 28 seconds with two-second intervals. The radio coverage in the hall with moving cars and rotating robots can be observed in the time-dependent results.