
Define an OML Custom Block
Tutorial Level: Intermediate Learn how to define the behavior of a spring damper model using an OML Custom Block.
Files for This Tutorial
Spring Damper_oml_block.scm
Create the Spring Damper Model
-
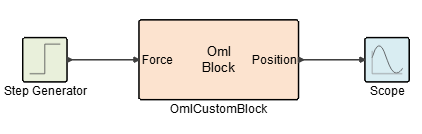
Drag an OML Custom Block, Step Generator and Scope block into your model
diagram:
-
Assemble your diagram:
- Save and name your model.
-
Select the Diagram icon.

-
Define the Context of the system model where F is the applied force, M is mass,
k_s is the spring coefficient, k_d is the damping coefficient, and x0 specifies
the initial state for velocity and position:
F=2; M-2; k_s = 1; k_d = 1; x0 = [0,0];
Define the Step Generator
- Double-click the Step Generator block.
-
For Final value, enter F, which is the Force.
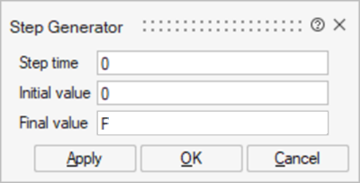
- Keep the default values for the Step time and Initial value.
Define the OML Custom Block
Define the ports, states, parameters, and simulation function for the OML Custom Block.
- Double-click the Oml Custom Block in your model.
-
Select the Ports tab.
- For Number of input ports, enter 1 and name it Force.
- Select the Feedthrough option, which specifies that the system input directly affects the output.
- Enter 1 output port and name it Position.
- Keep the defaults for the remaining fields.

-
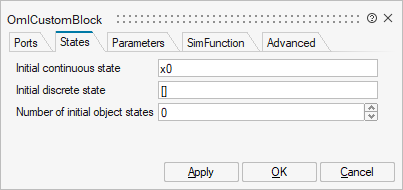
Select the States tab:
- For the Initial continuous state, enter x0.
- Keep the defaults for the remaining fields.
-
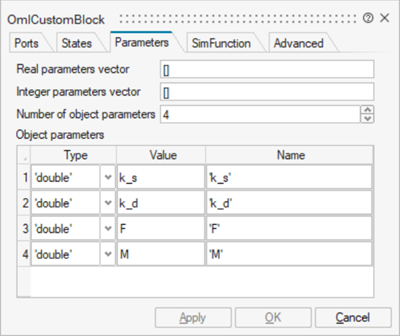
Select the Parameters tab:
For Number of object parameters, enter 4 and define them as follows:
Define the Sim Function
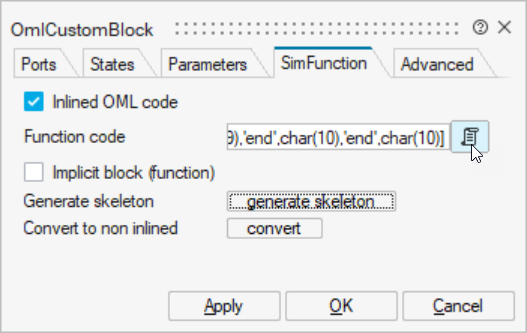
- Select the SimFunction tab.
-
Click the generate skeleton button, then click the text
editor button.
The software generates a code skeleton with the appropriate flag options based on the information you defined in the simulation function and diagram context. You utilize the flags that you want to include and ignore the flags that are not required for your model.Note: The structure of the skeleton that is generated is the same for different custom blocks, such as CCustomBlock and PyCustomBlock, respecting the syntax of each programming language that is deployed.
-
To complete the simulation function for the spring damper, modify the code in 4
places as you see in the following image:
- Line 9, add:
Position = x(2); - Line 17, uncomment:
vssSetOutputData (block,1, Position, vssGetOutputDataType (block,1)); - Line 20, add the equation of motion:
xd = [(Force-k_d*x(1)-k_s*x(2))/M ; x(1)]; - Line 21, uncomment
and modify <derivative value> to reference the drivative state variable:vssSetDerState(block,<derivative value>);vssSetDerState(block,xd);
Your new script should look like this: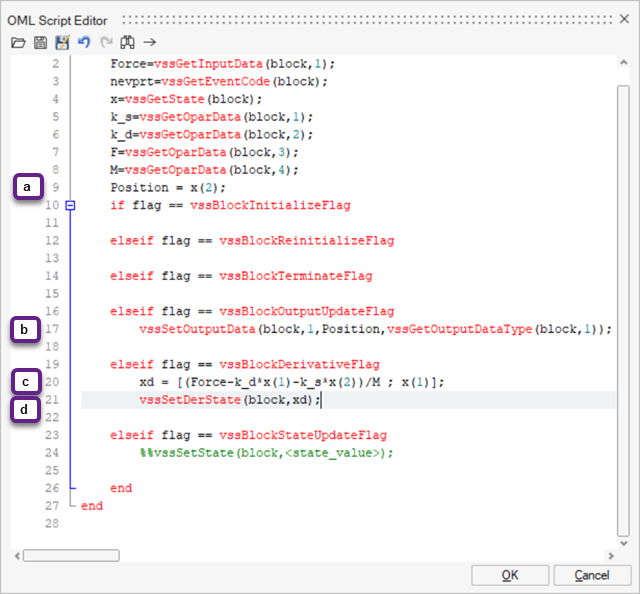
- Line 9, add:
-
Click OK.
For your reference, the following table explains the flags presented in the skeleton for this tutorial.
Flag/API Description Applied in this tutorial Force=vssGetInputData(block,1);vssGetInputDatais called to define the Force variable as equal to the block's signal input.Yes nevprt=vssGetEventCode(block);GetEventCodeis called to define the variable nevprt as equal to the block's event input (none in this case).Yes x=vssGetState(block);GetStateis called to define the variable x as equal to the given block states.Yes k_s=vssGetOparData(block,1);GetOparDatais called to define the the variable k_s as equal to the given Object Parameter 1 that is defined in the Parameters tab.Yes k_d=vssGetOparData(block,2);GetOparDatais called to define the the variable k_d as equal to the given Object Parameter 2, which is defined in the Parameters tab.Yes F=vssGetOparData(block,3);GetOparDatais called to define the variable F as equal to the given Object Parameter 3, which is defined in the Parameters tab.Yes M=vssGetOparData(block,4);GetOparDatais called to define the the variable M as equal to the given Object Parameter 4, which is defined in the Parameters tab. The API is also called to enable the calculation ofPosition = x(2);Yes if flag == vssBlockInitializeFlagThis flag is called at the start of a simulation to allocate memory, or to open a file or channel. No elseif flag == vssBlockReinitializeFlagThis flag is used mainly with continuous blocks for updating states based on a defined input. For example, the block can be called by the simulator during the initialization phase to find the steady state of a system. No elseif flag == vssBlockTerminateFlagThis flag is called only once at the end of a simulation if the block requires final tasks such as clearing variables, exporting, or organizing information once the block execution has finished. No elseif flag == vssBlockOutputUpdateFlagThis flag is called to compute the outputs during a simulation and is called every time the block is activated. In this tutorial, the Output that is triggered is defined with vssSetOuputData.Yes vssSetOutputData (block,1,Position,vssGetOutputDataType(block,1));vssSetOutputDatais called to define the output.Yes vssGetOutputDataTypeis is called to assign a data type to the output signal.Yes elseif flag == vssBlockDerivativeFlagxd = [(Force-k_d*x(1)-k_s*x(2))/M ; x(1)];vssSetDerState(block,xd);This flag is called to apply a computation to the system, which in this tutorial is the equation of motion ( xd = [(Force-k_d*x(1)-k_s*x(2))/M ; x(1)];). The APIvssSetDerStateis then called to set the derivative state equal to the system's velocity that was solved in the equation of motion.Yes elseif flag == vssBlockStateUpdateFlagThis flag is called for the blocks that have states to update the states. This flag is called every time that a block is activated. No
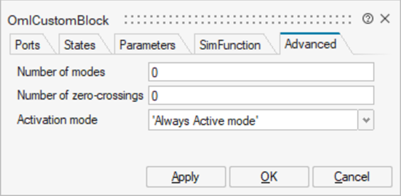
Define Advanced Settings
- Select the Advanced tab.
-
For Activation mode, select Always Active mode, which
specifies that the block is dependent on time and will be called continuously at
each step of the simulation.
-
Click OK.
The setup for the spring damping model is complete.
Run the Simulation
- Keep the default values for the simulation parameters.
-
Click Run.

-
When the simulation finishes running, double-click the
Scope block.
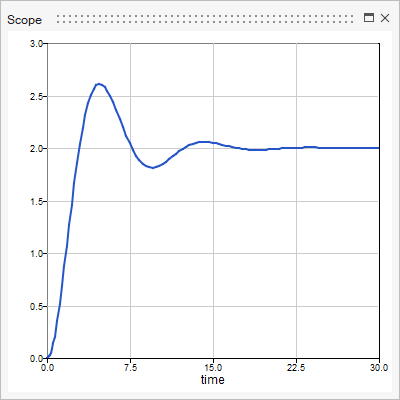
The scope shows the signal output from the OML Custom Block as Position vs. Time.