
基元
基元是使用硬点和矢量定义的简单几何形状。示例包括长方体、圆柱体或球体。
它可以定义为成对实体,有助于创建在 x-z 平面上具有相同实体的模型。成对实体可以具有非对称或对称的属性。对称时,一侧的属性会围绕 x-z 平面镜像到另一侧。
有关如何添加或编辑基元等实体的信息,请参阅 实体创建。
创建基元时,有四种形状可供选择:
- 圆柱体
- 长方体
- 球体
- 椭圆体
对于长方体形状,您必须选择类型:
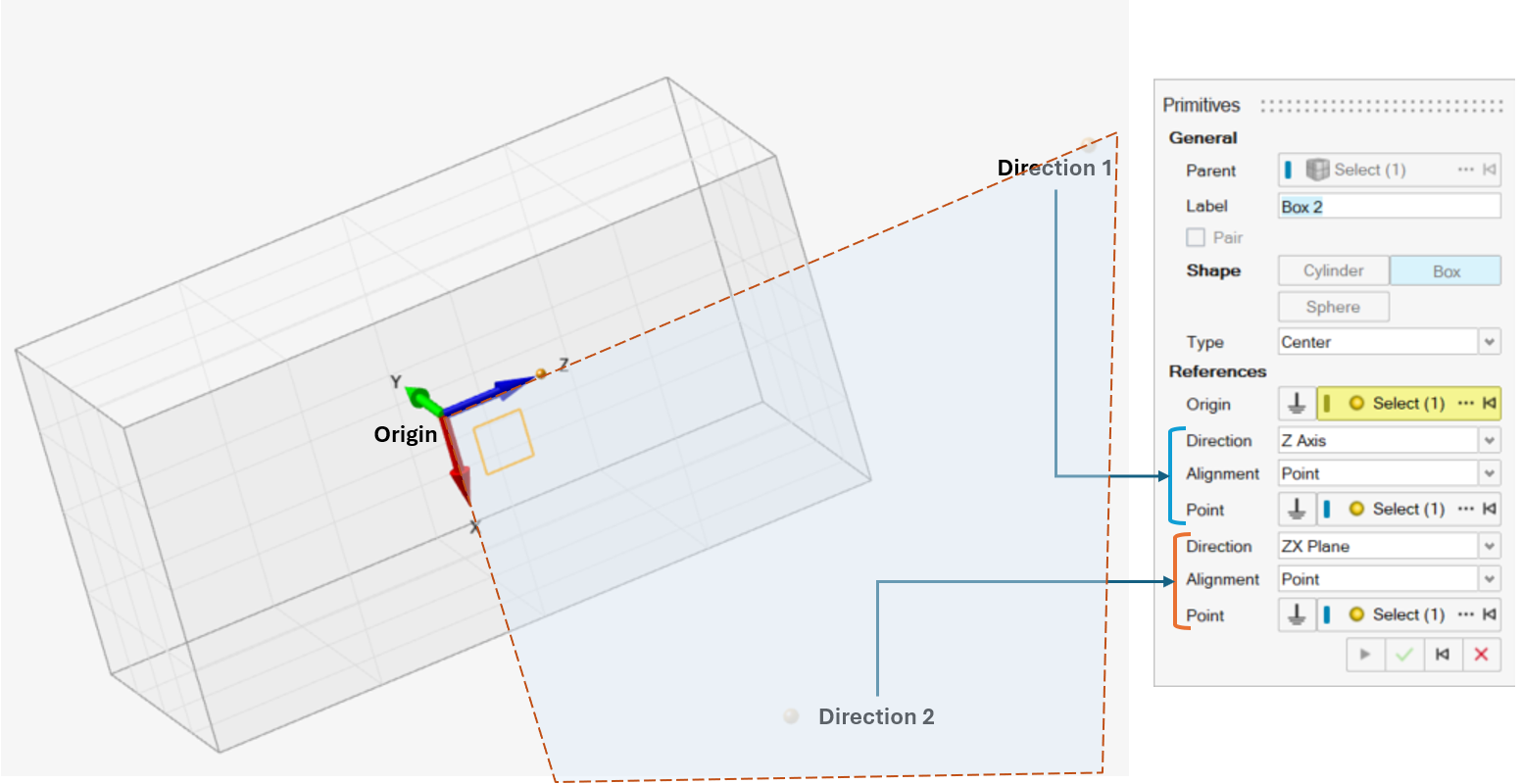
- 中心:长方体坐标系的原点位于中心。
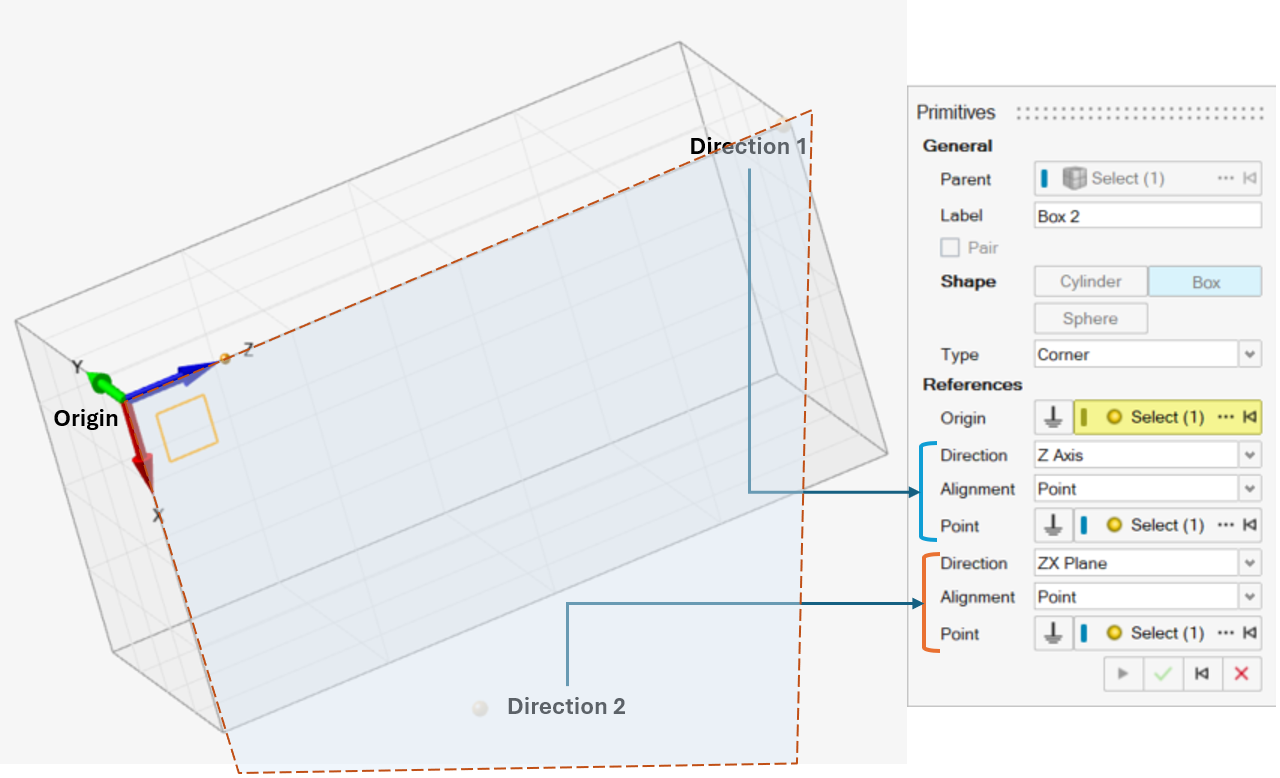
- 角点:长方体坐标系的原点位于一个角上。
- 面中心:长方体由两个点定义,这两个点构成一组相对的面。
下图显示了“中心”和“角点长方体”类型的方向。长方体坐标系将所选轴与第一个对齐实体(点或矢量)对齐,并使所选平面与第二个对齐实体平行。
 |
 |
面中心长方体的定向如下所示。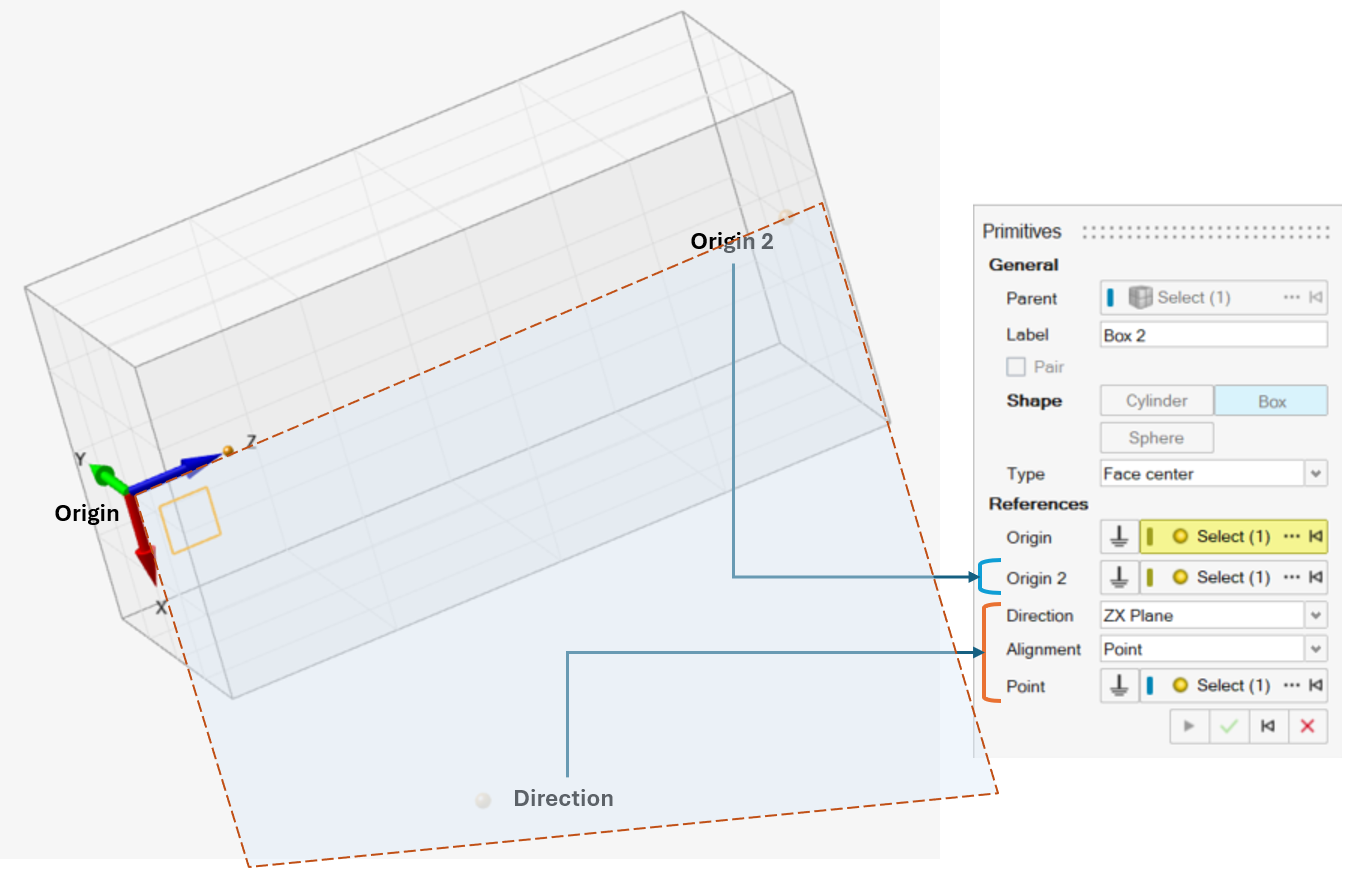
基元属性
属性编辑器中基元属性的描述。
| 属性 | 说明 |
|---|---|
| 常规 | |
| 名称 | 实体名称 |
| 变量名称 | 变量名,实体的唯一标识符字符串 |
| ID | 一个唯一的标识性整数 |
| 地平面 | 使零件接地。 |
| 刚体组 | 刚体组名称(如果基元是刚体组的一部分) 只读 |
| 材料 | 为基元指定材料。 |
| 显示 | |
| 颜色 | 为基元指定颜色。 |
| 透明度 | 将显示零件的透明度设置为 0 到 100% 之间。 |
| 几何属性 | |
| 圆柱体 | |
| 原点 | 圆柱体其中一个底面的中心。 |
| 对齐方法 | 设置定向方法
|
| 点(对齐) | 指示方向的点 仅在“对齐方式”为“点”时有效。 |
| 矢量(对齐) | 表示方向的矢量 仅当“对齐方法”为“矢量”时才有效 |
| 自动长度 | 将圆柱体长度设置为原点与对齐点之间的距离。 适用于对齐方法为点的情况 |
| 长度 | 圆柱体的长度 适用于“对齐方法”为“矢量”或“自动长度”关闭的情况 |
| 半径 1 | 包含原点的圆柱体底面半径 |
| 半径 2 | 对边圆柱体底面的半径,不包含原点 |
| 长方体 | |
| 原点 | 长方体的原点 |
| 类型 | 长方体类型 中心、角或面中心 |
| 方向 1 | 第一个要定向的方向轴 X、Y 或 Z 仅适用于中心和角点长方体 |
| 方法 1 | 点或矢量 仅适用于中心和角点长方体 |
| 点 1 | 指示所选坐标轴从原点出发方向的点
|
| 矢量 1 | 矢量,表示所选坐标轴从原点出发的方向
|
| 方向 2 | 根据方向 1 的选择进行定向的平面 XY | XZ | YX | YZ | ZX | ZY 对于面中心长方体,只有 ZX | ZY 平面可用。 |
| 方法 2 | 设置定向方法 点或矢量 |
| 点 2 | 指示平面方向的点,使所选点位于该平面内 仅当“对齐方法 2”为“点”时才有效 |
| 矢量 2 | 表示平面方向的矢量,使所选矢量位于平面内 仅当“对齐方法 2”为“矢量”时才有效 |
| 原点 2 | 表示与原点相对的面上的点
|
| 长度 X | X 轴方向的长度。 |
| 长度 Y | Y 轴方向的长度。 |
| 长度 Z | Z 轴方向的长度。 |
| 球体 | |
| 原点 | 球体的中心点 |
| 半径 | 球体的半径 |
| 椭圆体 | |
| 原点 | 椭圆体的中心点 |
| 第 1 轴 | |
| 方向 1 | 第一个要定向的方向轴 X、Y 或 Z |
| 方法 1 | 设置定向方法 点或矢量 |
| 点 1 | 指示所选坐标轴从原点出发方向的点 仅当“方法 1”为“点”时才有效 |
| 矢量 1 | 矢量,表示所选坐标轴从原点出发的方向 仅在“对齐方法 1”为“矢量”时有效 |
| 第 2 轴 | |
| 点 | 选择硬点、顶点、边、面或全局原点。选择顶点、边缘或面时,将在边缘或面的中心创建点。 |
| 方向 2 | 根据方向 1 的选择进行定向的平面 XY | XZ, YX | YZ 或 ZX | ZY |
| 方法 2 | 设置定向方法 点或矢量 |
| 点 2 | 指示平面方向的点,使所选点位于该平面内 仅当“对齐方法 2”为“点”时才有效 |
| 矢量 2 | 表示平面方向的矢量,使所选矢量位于平面内 仅当“对齐方法 2”为“矢量”时才有效 |
| 半径 X | 定义椭圆体沿自身局部 x 轴的半轴长度。该参数指定了从椭圆体原点沿正负 x 方向到其最外表面的距离。 |
| 半径 Y | 定义椭圆体沿自身局部 y 轴的半轴长度。该参数指定了从椭圆体原点沿正负 y 方向到其最外表面的距离。 |
| 半径 Z | 定义椭圆体沿自身局部 z 轴的半轴长度。该参数指定了从椭圆体原点沿正负 z 方向到其最外表面的距离。 |
| 质量属性 | 当覆盖关闭时为只读 |
| 覆盖 | 根据几何体和指定材料覆盖自动计算的质量、惯性和质心。 |
| 质量 | 基元的质量 |
| Ixx | 绕 X 轴的转动惯量 |
| Iyy | 绕 Y 轴的转动惯量 |
| Izz | 绕 Z 轴的转动惯量 |
| Ixy | 关于 XY 平面的惯性积 |
| Ixz | 关于 XZ 平面的惯性积 |
| Iyz | 关于 YZ 平面的惯性积 |
|
注: 质量惯性矩值是相对于质量中心坐标系提供的。
|
|
| 初始条件 | 设置基元的初始速度条件。 |
| 平移速度 | 设置基元沿平移方向的初始速度条件。 |
| 用户定义的 VM | 打开该选项可为平移速度提供参考标记。该选项关闭时,参考标记为“全局帧”。 |
| 标记 | 平移速度参考帧 |
| Vx | 用于指定沿 X 轴初始速度的标志 |
| Vx | 沿 X 轴的初始速度值 |
| Vy | 用于指定沿 Y 轴初始速度的标志 |
| Vy | 沿 Y 轴的初始速度值 |
| Vz | 用于指定沿 Z 轴初始速度的标志 |
| Vz | 沿 Z 轴的初始速度值 |
| 旋转速度 | 设置基元绕旋转方向的初速度条件。 |
| 用户定义的 VM | 打开该选项可为旋转速度提供参考标记。该选项关闭时,参考标记为零件的 CM 标记。 |
| Wm | 旋转速度参考帧 |
| Wx | 用于指定 X 轴初始速度的标志 |
| Wx | 绕 X 轴的初始速度值 |
| Wy | 用于指定 Y 轴初始速度的标志 |
| Wy | 绕 Y 轴的初始速度值 |
| Wz | 用于指定 Z 轴初始速度的标志 |
| Wz | 绕 Z 轴的初始速度值 |
| 运动接触 | |
| 翻转材料面 | 翻转接触面。 |
| 自动计算分辨率 | 在运动接触(中)中使用时,使用网格化的默认分辨率。 |
| 分辨率 | 关闭自动计算分辨率时,请选择极低至极高之间的分辨率。 |