HyperLife Coordinate Systems
In the Contour, Iso, Tensor, and Vector panels, you can select the result coordinate system to be used to process results.
Subsequent options are dependent on the current averaging method. The available coordinate systems are:
Global
The HyperLife default coordinate system. It is displayed in the bottom left corner of the HyperLife modeling window.Element
Defined from the geometry, that is, the nodal connectivity of the element. The HyperLife element coordinate systems for the following elements are described:- Quad4/Quad8
- For Quad elements, the reader automatically selects one of the following methods:
Figure 1. Method 1 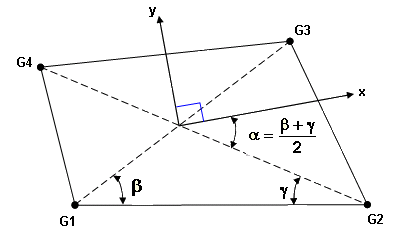
- The origin of the coordinate system is located at the centroid of the element.
- x is along a line that bisects the angles between G2-G4 and G1-G3.
- y is perpendicular to x as shown in the figure.
Figure 2. Method 2 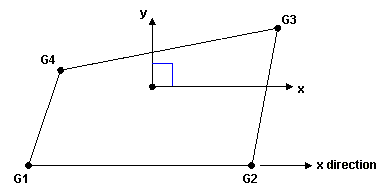
- The origin of the coordinate system is located at the centroid of the element.
- x is along the G1-G2 line.
- y is perpendicular to x.
- Tria3/Tria6
-
Figure 3. 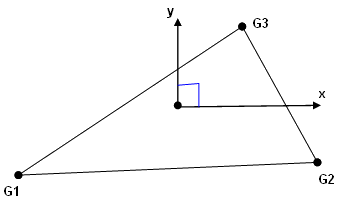
- The origin of the coordinate system is located at the centroid of the element.
- x is along the G1-G2 line.
- y is perpendicular to x as shown in the figure.
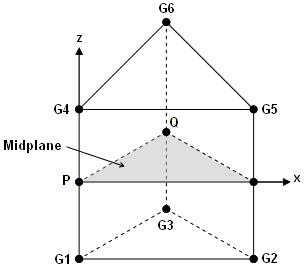
- Hexa8/Hexa20
- The element coordinate system for the Hexa element is defined in terms of the three
vectors R, S, and T, which join the centroids of opposite faces, as follows:
- R vector joins the centroids of faces G4-G1-G5-G8 and G3-G2-G6-G7.
- S vector joins the centroids of faces G1-G2-G6-G5 and G4-G3-G7-G8.
- T vector joins the centroids of faces G1-G2-G3-G4 and G5-G6-G7-G8.
The origin of the coordinate system is located at the centroid of the element. The axes are derived as follows:- z = T
- y = T x R
- x = y x z
Figure 4. 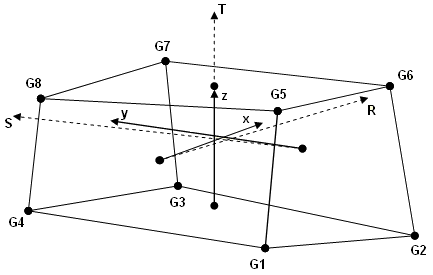
- Tetra
- The element coordinate system is derived from the three vectors, R, S, and T, which
join the midpoints of opposite edges, as follows:
- R vector joins midpoints of edges G1-G2 and G3-G4.
- S vector joins midpoints of edges G1-G3 and G2-G4.
- T vector joins midpoints of edges G1-G4 and G2-G3.
The origin of the coordinate system is located at the centroid of the element. The axes are derived as follows:- z = T
- y = T x R
- x = y x z
Figure 5. 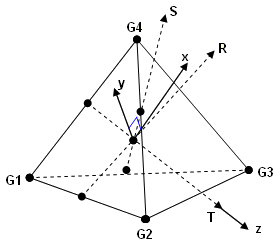
- Penta
- The element coordinate system for the Penta element is derived as follows:

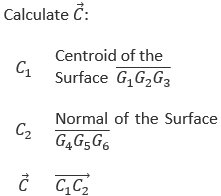
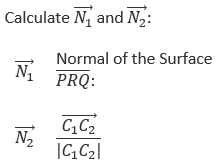

Figure 6.