Repère : à propos
Utilisation
Les repères sont utilisés pour faciliter la description de la géométrie et le déplacement relatif de différentes pièces.
Types de repères
Les différents types de repères pour Flux PEEC et les coordonnées associées sont présentés ci-dessous.
|
Repère cartésien 3D Coordonnées (x,y,z) |
Repère cylindrique 3D Coordonnées (r,θ,z) |
Repère sphérique 3D Coordonnées (r,θ,φ) |
|---|---|---|
 |
 |

|
Repères de référence
Il est possible de distinguer les repères suivants :
- Le repère absolu est le repère de référence dans lequel sont effectués les calculs. Il est inaccessible pour l'utilisateur. Le repère absolu est un repère cartésien universel avec comme unité de longueur le mètre et unité d'angle le degré.
- Les repères de travail sont les repères créés par l'utilisateur pour les besoins de
l'étude.Les repères de travail peuvent être définis :
- par rapport au repère Absolu lorsqu'ils font référence au repère absolu,
- par rapport à un repère Local lorsqu'ils font référence à un repère quelconque.
Toutes les entités sont définies dans les repères de travail (les repères de l'utilisateur) et sont évaluées dans le repère absolu pour les calculs.
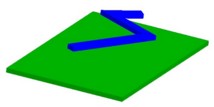
Exemple
Pour décrire le dispositif représenté sur la figure ci-dessous, deux repères géométriques sont utilisés :
- Un repère pour la description du plan de masse CART_PLAN :
Type : cartésien
Repère de référence : Absolu
Caractéristiques spécifiques :- unité de longueur : millimètre
- unité d'angle : degré
Positionnement :- centre : 0, 0, 0
- rotation : 0, 0, 0
- Un repère pour la description du conducteur CART_COND :
Type : cartésien
Repère de référence : Local
Caractéristiques spécifiques :- repère père : CART_PLAN
Positionnement :
- centre : 3, 15, 5
- rotation : -30, 0, 0
Positionnement du repère dans son repère de référence
Un repère est positionné dans son repère de référence à l'aide :
- des coordonnées du centre de ce repère dans le repère de référence
- des angles de rotation des axes de ce repère par rapport aux axes du repère de référence
Si malheureusement le repère, que vous cherchez à définir, n'est pas défini de cette façon (ordre d'applications différent ou bien axe de rotation toujours repéré dans le repère global), vous allez devoir re-décomposer les rotations.
Exemples de positionnement
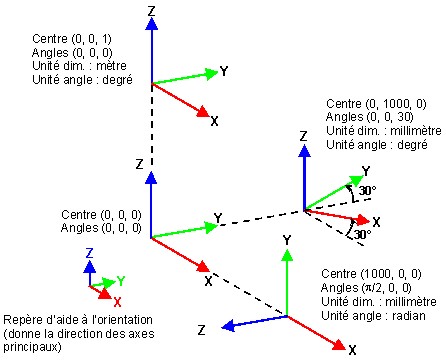
Unités du repère
L'utilisateur peut définir les unités de longueur et d'angle pour un repère défini par rapport au repère Absolu.
Un repère défini par rapport au repère Local a pour unités celles du repère de référence (repère père).
Paramétrage
Les coordonnées du centre et les angles de rotation autour des axes peuvent être définis à l'aide d'une expression algébrique qui peut contenir :
- des constantes
- des paramètres géométriques (préalablement créés)
- les fonctions mathématiques de base utilisant des opérateurs : +, -, *, /, ( )
- les fonctions mathématiques usuelles admises par le FORTRAN
Les fonctions mathématiques sont décrites dans la section Fonctions.