Vehicle-to-X Communication and Automotive Radar
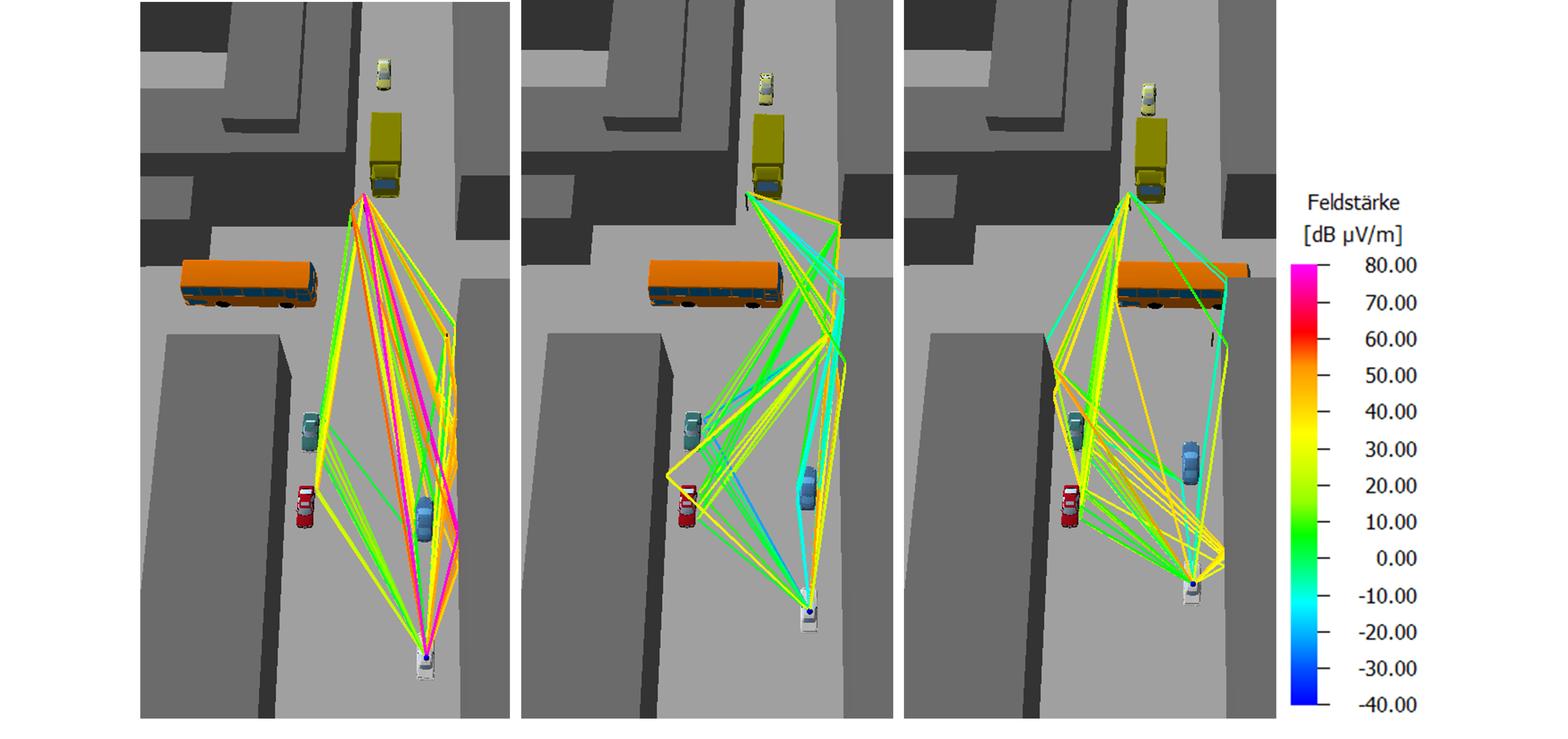
In vehicle-to-vehicle and vehicle-to-infrastructure communication, as well as in simulations of automotive radar, you usually want to include at least one moving vehicle in the simulation. Therefore, these fall in the category of time-variant scenarios. Applications of vehicle-to-X communication include vehicular networks, intelligent transportation systems, and active safety measures at intersections, see Figure 1.
Advanced driver assistance systems use sensors such as automotive radar. The transmitter and the receiver are connected to small antenna arrays, often mounted side by side in the front bumper.
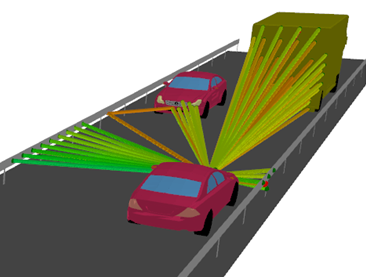
In addition to power of individual rays, Doppler shift and delay are reported for further post-processing.
A useful option for automotive-radar simulations is to import patterns of monostatic radar cross section (RCS) from Feko. This can save simulation time and improve accuracy. The complicated reflecting object in WinProp can be replaced by a simple object plus the RCS information, see Figure 3.
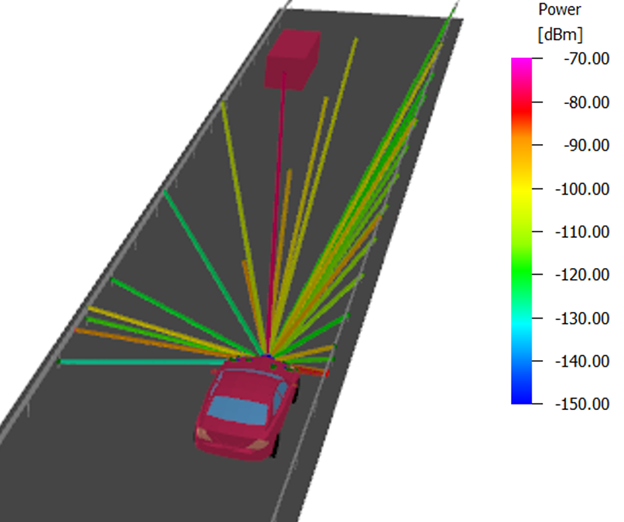
Since monostatic RCS contains only the backscatter information, it is not suited for vehicle-to-X communication simulations.