
RollingWheelSet
Ideal rolling wheel set consisting of two ideal rolling wheels connected together by an axis
![]()
Library
Modelica/Mechanics/MultiBody/Parts
Description
Two wheels are connected by an axis and can rotate around this axis.The wheels are rolling on the x-y plane of the world frame.The coordinate system attached to the center of the wheel axis (frameMiddle)is constrained so that it is always parallel to the x-y plane.If all generalized coordinates are zero, frameMiddle is parallelto the world frame.
Note
To work properly, the gravity acceleration vector g of the world must point in the negative z-axis, i.e.
inner Modelica.Mechanics.MultiBody.World world(n={0,0,-1});
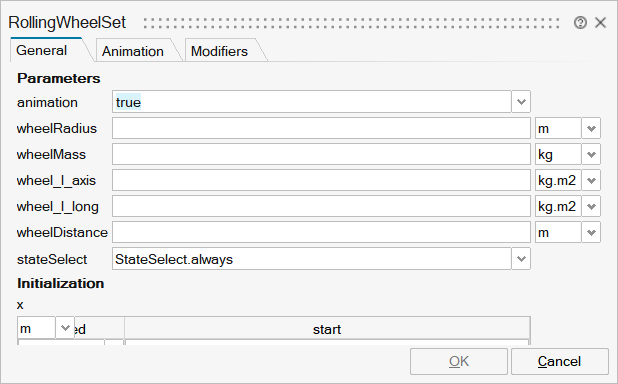
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
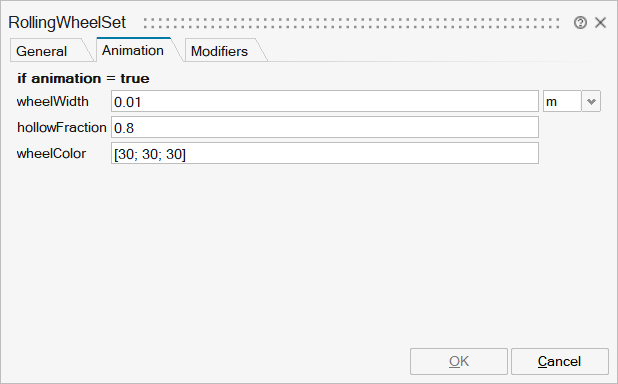
mo_animation | animation | = true, if animation of wheel set shall be enabled | Scalar | true |
mo_R_wheel | R_wheel | Radius of one wheel | Scalar | |
mo_m_wheel | m_wheel | Mass of one wheel | Scalar | |
mo_I_wheelAxis | I_wheelAxis | Inertia along one wheel axis | Scalar | |
mo_I_wheelLong | I_wheelLong | Inertia perpendicular to one wheel axis | Scalar | |
mo_track | track | Distance between the two wheels (= axle track) | Scalar | |
mo_stateSelect | stateSelect | Priority to use the generalized coordinates as states | Structure | |
mo_stateSelect/choice1 | StateSelect.never | Number | 0 | |
mo_stateSelect/choice2 | StateSelect.avoid | Number | 0 | |
mo_stateSelect/choice3 | StateSelect.default | Number | 0 | |
mo_stateSelect/choice4 | StateSelect.prefer | Number | 0 | |
mo_stateSelect/choice5 | StateSelect.always | Number | 0 | |
mo_x | x | x | Structure | |
mo_x/fixed | fixed | Cell of scalars | true | |
mo_x/start | start | Cell of scalars | ||
mo_y | y | y | Structure | |
mo_y/fixed | fixed | Cell of scalars | true | |
mo_y/start | start | Cell of scalars | ||
mo_phi | phi | phi | Structure | |
mo_phi/fixed | fixed | Cell of scalars | true | |
mo_phi/start | start | Cell of scalars | ||
mo_theta1 | theta1 | theta1 | Structure | |
mo_theta1/fixed | fixed | Cell of scalars | true | |
mo_theta1/start | start | Cell of scalars | ||
mo_theta2 | theta2 | theta2 | Structure | |
mo_theta2/fixed | fixed | Cell of scalars | true | |
mo_theta2/start | start | Cell of scalars | ||
mo_der_theta1 | der_theta1 | der_theta1 | Structure | |
mo_der_theta1/fixed | fixed | Cell of scalars | true | |
mo_der_theta1/start | start | Cell of scalars | ||
mo_der_theta2 | der_theta2 | der_theta2 | Structure | |
mo_der_theta2/fixed | fixed | Cell of scalars | true | |
mo_der_theta2/start | start | Cell of scalars |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_width_wheel | width_wheel | Width of one wheel | Scalar | |
mo_hollowFraction | hollowFraction | For ring-like wheel visualization: wheel radius / inner hole radius; i.e. 1.0: completely hollow, 0.0: full disc | Scalar | |
mo_color | color | Color of wheels | Vector of size 3 |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo__nmodifiers | Number of Modifiers | Specifies the number of modifiers | Number | |
mo__modifiers | Modifiers | Add new modifier | Structure | |
mo__modifiers/varname | Variable name | Cell of strings | ||
mo__modifiers/attribute | Attribute | Cell of strings | 'start' | |
mo__modifiers/value | Value |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
frameMiddle | implicit | Frame fixed in middle of axis connecting both wheels (y-axis: along wheel axis, z-axis: upwards) | input | 1 |
frame1 | implicit | Frame fixed in center point of left wheel (y-axis: along wheel axis, z-axis: upwards) | input | 2 |
frame2 | implicit | Frame fixed in center point of right wheel (y-axis: along wheel axis, z-axis: upwards) | output | 1 |
axis1 | implicit | 1-dim. rotational flange that drives the left wheel | input | 3 |
axis2 | implicit | 1-dim. rotational flange that drives the right wheel | input | 4 |
support | implicit | Support of 1D axes | output | 2 |