
RollingConstraintVerticalWheel
Rolling constraint for wheel that is always perpendicular to x-y plane
![]()
Library
Modelica/Mechanics/MultiBody/Joints/Internal
Description
Joint for a wheel rolling on the x-y plane of the world frameintended for an idealized wheelset.To meet this objective, the wheel always runs upright and enables noslip in the longitudinal direction of the wheel/ground contact.
On the contrary, the wheel can optionally slip in the lateral directionwhich is reasonable for the wheelset where just one of the wheelsshould be laterally constrained.
The frame frame_a is placed in the intersection of the wheel spin axiswith the wheel middle plane and rotates with the wheel itself.A wheel body collecting the mass and inertia should be connected tothis frame.
Note
To work properly, the gravity acceleration vector g of the world must point in the negative z-axis, i.e.
inner Modelica.Mechanics.MultiBody.World world(n={0,0,-1});
Parameters
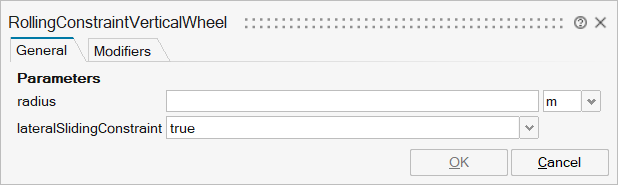
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_radius | radius | Wheel radius | Scalar | |
mo_lateralSlidingConstraint | lateralSlidingConstraint | = true, if lateral sliding constraint taken into account, = false if lateral force = 0 (needed to avoid overconstraining if two ideal rolling wheels are connect on one axis) | Scalar | true |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo__nmodifiers | Number of Modifiers | Specifies the number of modifiers | Number | |
mo__modifiers | Modifiers | Add new modifier | Structure | |
mo__modifiers/varname | Variable name | Cell of strings | 'f_wheel_0' | |
mo__modifiers/attribute | Attribute | Cell of strings | 'start' | |
mo__modifiers/value | Value |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
frame_a | implicit | Frame fixed in wheel center point. x-Axis: upwards, y-axis: along wheel axis | input | 1 |