
PrismaticWithLengthConstraint
Prismatic joint where the translational distance is computed from a length constraint (1 degree-of-freedom, no potential state)
![]()
Library
Modelica/Mechanics/MultiBody/Joints/Internal
Description
Joint where frame_b is translated along axis n which is fixed in frame_a.The two frames coincide when "s + s_offset = 0", where"s_offset" is a parameter with a zero defaultand "s" is the relative distance.
This variant of the prismatic joint is designed to work togetherwith a length constraint in a kinematic loop. This means that therelative distance "s" of the joint is computed such that thelength constraint is fulfilled.
Usually, this joint should not be used by a user of the MultiBodylibrary. It is only provided to built-up the Modelica.Mechanics.MultiBody.Joints.Assemblies.JointXYZjoints.
In releases before version 3.0 of the Modelica Standard Library, it was possibleto activate the force projection equation (= cut-force projected to the translationaxis must be identical to the driving force of flange axis) via parameteraxisForceBalance. This is no longer possible, since otherwise thismodel would not be "balanced" (= same number of unknowns as equations).Instead, when using this model in version 3.0 and later versions,the force in the length constraint component (Joints.SphericalSpherical orJoints.UniversalSpherical) must be calculated such that the driving forcein direction of the translationaxis is (RC shall be the name of the instance of PrismaticWithLengthConstraint):
0 = RC.axis.f + RC.e*RC.frame_b.f;
If this equation is used, usually the force in the length constraintand the second derivative of the prismatic distance will be part of a linearalgebraic system of equations. In some cases it is possible to solvethis system of equations locally, i.e., provide the rod force directlyas function of the prismatic constraint force. In any case, this projectionequation or an equivalent one has to be provided via variable "constraintResidue" in the "Advanced"menu of "Joints.SphericalSpherical" or "Joints.UniversalSpherical".
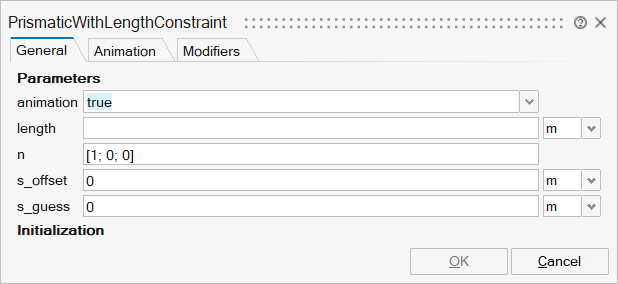
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_animation | animation | = true, if animation shall be enabled | Scalar | true |
mo_length | length | Fixed length of length constraint | Scalar | |
mo_n | n | Axis of translation resolved in frame_a (= same as in frame_b) | Vector of size 3 | |
mo_s_offset | s_offset | Relative distance offset (distance between frame_a and frame_b = s(t) + s_offset) | Scalar | |
mo_s_guess | s_guess | Select the configuration such that at initial time |s(t0)-s_guess| is minimal | Scalar | |
mo_positiveBranch | positiveBranch | Selection of one of the two solutions of the non-linear constraint equation | Scalar | true |
mo_e | e | Unit vector in direction of translation axis, resolved in frame_a | Vector of size 3 | |
mo_k1a | k1a | k1a | Structure | |
mo_k1a/fixed | fixed | Cell of scalars | true | |
mo_k1a/start | start | Cell of scalars |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
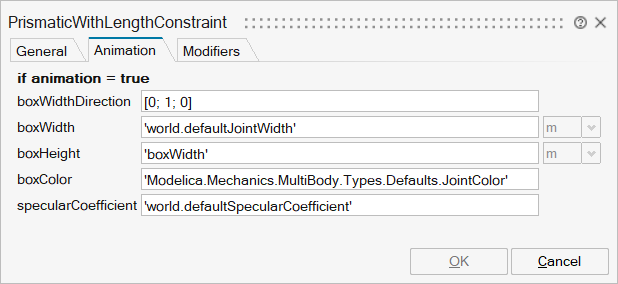
mo_boxWidthDirection | boxWidthDirection | Vector in width direction of box, resolved in frame_a | Vector of size 3 | |
mo_boxWidth | boxWidth | Width of prismatic joint box | Scalar | |
mo_boxHeight | boxHeight | Height of prismatic joint box | Scalar | |
mo_boxColor | boxColor | Color of prismatic joint box | Vector of size 3 | |
mo_specularCoefficient | specularCoefficient | Reflection of ambient light (= 0: light is completely absorbed) | Scalar |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo__nmodifiers | Number of Modifiers | Specifies the number of modifiers | Number | |
mo__modifiers | Modifiers | Add new modifier | Structure | |
mo__modifiers/varname | Variable name | Cell of strings | 's' | |
mo__modifiers/attribute | Attribute | Cell of strings | 'start' | |
mo__modifiers/value | Value |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
frame_a | implicit | Coordinate system a fixed to the component with one cut-force and cut-torque | input | 1 |
frame_b | implicit | Coordinate system b fixed to the component with one cut-force and cut-torque | output | 1 |
axis | implicit | 1-dim. translational flange that drives the joint | input | 2 |
bearing | implicit | 1-dim. translational flange of the drive bearing | output | 2 |
position_a | implicit | Position vector from frame_a to frame_a side of length constraint, resolved in frame_a of prismatic joint | input | 3 |
position_b | implicit | Position vector from frame_b to frame_b side of length constraint, resolved in frame_b of prismatic joint | input | 4 |