
InitAngularVelocity
Internal model to initialize w_rel_b for Joints.FreeMotionScalarInit
![]()
Library
Modelica/Mechanics/MultiBody/Joints/Internal
Description
Compute relative angular velocity w_rel_b of anorientation object R_brelative to anorientation object R_a,resolved in orientation object R_b, i.e.
w_b_b = w_a_b + w_rel_b,
where
w_b_b ...... absolute angular velocity of frame_b resolved in frame_b,w_a_b ...... absolute angular velocity of frame_a resolved in frame_b,w_rel_b .... relative angular velocity resolved in frame_b.
Parameters
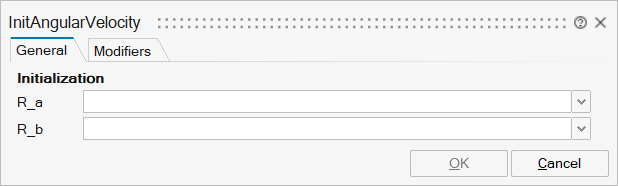
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_R_a | R_a | FromModelica('Modelica.Mechanics.MultiBody.Frames.Orientation') | ||
mo_R_b | R_b | FromModelica('Modelica.Mechanics.MultiBody.Frames.Orientation') |
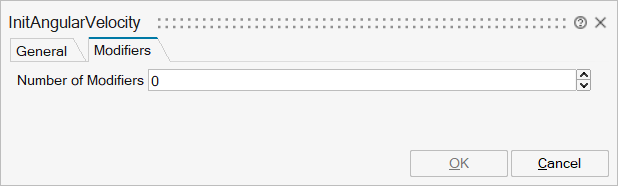
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo__nmodifiers | Number of Modifiers | Specifies the number of modifiers | Number | |
mo__modifiers | Modifiers | Add new modifier | Structure | |
mo__modifiers/varname | Variable name | Cell of strings | ||
mo__modifiers/attribute | Attribute | Cell of strings | 'start' | |
mo__modifiers/value | Value |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
w_rel_b | implicit | output | 1 |