
JointRRR
Planar revolute - revolute - revolute joint aggregation (no constraints, no potential states)
![]()
Library
Modelica/Mechanics/MultiBody/Joints/Assemblies
Description
This component consists of 3 revolute joints with parallelaxes of rotation that are connected together by two rods, see the defaultanimation in the following figure (the axes vectors are not part of thedefault animation):
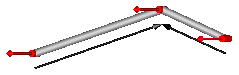
This joint aggregation introduces neither constraints nor state variables andshould therefore be used in kinematic loops whenever possible toavoid non-linear systems of equations. It is only meaningful touse this component in planar loops. Basically, the positionand orientation of the 3 revolute joints as well as of frame_ia, frame_ib, andframe_im are calculated by solving analytically a non-linear equation,given the position and orientation at frame_a and at frame_b.
Connector frame_a is the "left" side of the first revolute jointwhereas frame_ia is the "right side of this revolute joint, fixed in rod 1.Connector frame_b is the "right" side of the third revolute jointwhereas frame_ib is the "left" side of this revolute joint, fixed in rod 2.Finally, connector frame_im is the connector at the "right" sideof the revolute joint in the middle, fixed in rod 2.
The easiest way to define the parameters of this joint is by moving theMultiBody system in a reference configuration where all framesof all components are parallel to each other (alternatively,at least frame_a, frame_ia, frame_im, frame_ib, frame_b of the JointRRR jointshould be parallel to each other when defining an instance of thiscomponent).
Basically, the JointRRR model consists internally of a universal -spherical - revolute joint aggregation (= JointUSR). In a planarloop this will behave as if 3 revolute joints with parallel axesare connected by rigid rods.
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
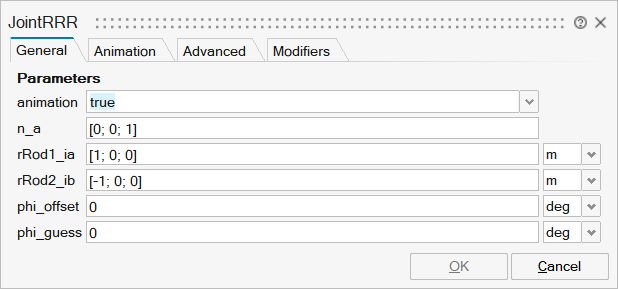
mo_animation | animation | = true, if animation shall be enabled | Scalar | true |
mo_n_a | n_a | Axes of revolute joints resolved in frame_a (all axes are parallel to each other) | Vector of size 3 | |
mo_n_b | n_b | Axis of revolute joint fixed and resolved in frame_b | Vector of size 3 | |
mo_rRod1_ia | rRod1_ia | Vector from origin of frame_a to revolute joint in the middle, resolved in frame_ia | Vector of size 3 | |
mo_rRod2_ib | rRod2_ib | Vector from origin of frame_ib to revolute joint in the middle, resolved in frame_ib | Vector of size 3 | |
mo_phi_offset | phi_offset | Relative angle offset of revolute joint at frame_b (angle = phi(t) + from_deg(phi_offset)) | Scalar | |
mo_phi_guess | phi_guess | Select the configuration such that at initial time |phi(t0) - from_deg(phi_guess)| is minimal | Scalar | |
mo_e_a | e_a | Unit vector along axes of rotations, resolved in frame_a | Vector of size 3 | |
mo_e_ia | e_ia | Unit vector along axes of rotations, resolved in frame_ia | Vector of size 3 | |
mo_e_b | e_b | Unit vector along axes of rotations, resolved in frame_b, frame_ib and frame_im | Vector of size 3 |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
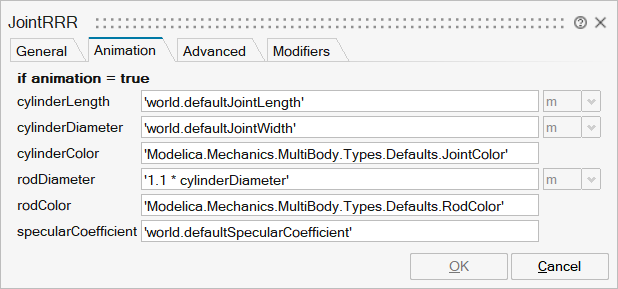
mo_cylinderLength | cylinderLength | Length of cylinders representing the revolute joints | Scalar | |
mo_cylinderDiameter | cylinderDiameter | Diameter of cylinders representing the revolute joints | Scalar | |
mo_cylinderColor | cylinderColor | Color of cylinders representing the revolute joints | Vector of size 3 | |
mo_rodDiameter | rodDiameter | Diameter of the two rods connecting the revolute joints | Scalar | |
mo_rodColor | rodColor | Color of the two rods connecting the revolute joint | Vector of size 3 | |
mo_specularCoefficient | specularCoefficient | Reflection of ambient light (= 0: light is completely absorbed) | Scalar |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_checkTotalPower | checkTotalPower | = true, if total power flowing into this component shall be determined (must be zero) | Scalar | true |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo__nmodifiers | Number of Modifiers | Specifies the number of modifiers | Number | |
mo__modifiers | Modifiers | Add new modifier | Structure | |
mo__modifiers/varname | Variable name | Cell of strings | 'totalPower' | |
mo__modifiers/attribute | Attribute | Cell of strings | 'start' | |
mo__modifiers/value | Value |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
frame_a | implicit | Coordinate system fixed to the component with one cut-force and cut-torque | input | 1 |
frame_b | implicit | Coordinate system fixed to the component with one cut-force and cut-torque | output | 1 |
frame_ia | implicit | Coordinate system at origin of frame_a fixed at connecting rod of left and middle revolute joint | input | 2 |
frame_ib | implicit | Coordinate system at origin of frame_b fixed at connecting rod of middle and right revolute joint | output | 2 |
frame_im | implicit | Coordinate system at origin of revolute joint in the middle fixed at connecting rod of middle and right revolute joint | output | 3 |
axis | implicit | 1-dim. rotational flange that drives the right revolute joint at frame_b | input | 3 |
bearing | implicit | 1-dim. rotational flange of the drive bearing of the right revolute joint at frame_b | output | 4 |