
AirGapR
Airgap in rotor-fixed coordinate system
![]()
Library
Modelica/Electrical/Machines/BasicMachines/Components
Description
Model of the airgap in rotor-fixed coordinate system, using only equations.Parameters
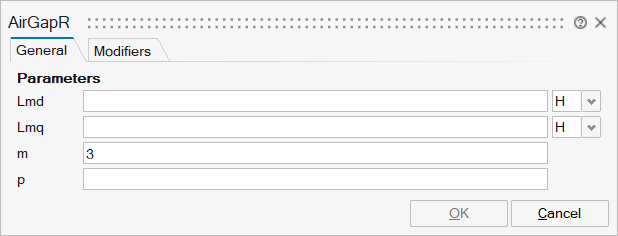
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_Lmd | Lmd | Main field inductance d-axis | Scalar | |
mo_Lmq | Lmq | Main field inductance q-axis | Scalar | |
mo_m | m | Number of phases | Scalar | |
mo_p | p | Number of pole pairs | Scalar | |
mo_L | L | Inductance matrix | Matrix of size 2x2 |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo__nmodifiers | Number of Modifiers | Specifies the number of modifiers | Number | |
mo__modifiers | Modifiers | Add new modifier | Structure | |
mo__modifiers/varname | Variable name | Cell of strings | 'tauElectrical' | |
mo__modifiers/attribute | Attribute | Cell of strings | 'start' | |
mo__modifiers/value | Value |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
flange | implicit | input | 1 | |
support | implicit | Support at which the reaction torque is acting | input | 2 |
spacePhasor_s | implicit | input | 3 | |
spacePhasor_r | implicit | input | 4 |