
LSController
Load Sensing Controller
![]()
Library
HydraulicsByFluidon/Components/Pumps/Controller
Description
The component LSController is a pump controller for use in load sensing applications.

The LS controller is a pressure control with an additional LS offset pressure to compensate the losses of pressure compensator valves. The inputs are normalized to the LS pressure, so that the input of gain, integrator, and derivative has the dimension 1. The output also ranges from 0 to 1 according to the displacement input of pumps.

The displacement is calculated with a first order delay parameterized by Time constant of pump displacement. The pumps themselves (VariableFlowPump, VariableFlowPumpCC, VariableDisplacementPump) have no dynamical displacement behavior.
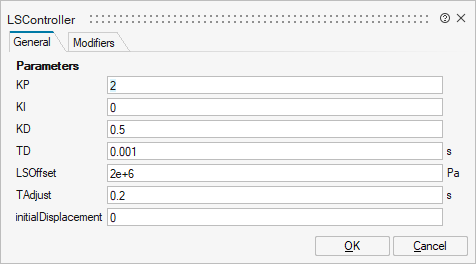
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_KP | KP | Gain of controller | Scalar | |
mo_KI | KI | Gain of integrator | Scalar | |
mo_KD | KD | Gain of derivative block | Scalar | |
mo_TD | TD | Time constant of derivative block | Scalar | |
mo_LSOffset | LSOffset | LS offset pressure | Scalar | |
mo_TAdjust | TAdjust | Time constant of pump displacement | Scalar | |
mo_initialDisplacement | initialDisplacement | Initial displacement | Scalar |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo__nmodifiers | Number of Modifiers | Specifies the number of modifiers | Number | |
mo__modifiers | Modifiers | Add new modifier | Structure | |
mo__modifiers/varname | Variable name | Cell of strings | ||
mo__modifiers/attribute | Attribute | Cell of strings | 'start' | |
mo__modifiers/value | Value |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
fluidPortP | implicit | Hydraulic port P | input | 1 |
fluidPortLS | implicit | Hydraulic port LS | input | 2 |
Displacement | implicit | output | 1 |