
Automat
The Automat block provides a facility to construct hybrid automata such as a hybrid system whose discrete part is defined by modes and transitions between modes, and the continuous part is defined via DAE (Differential Algebraic Equations).
![]()
Library
Activate/Hybrid
Description
The Automat block provides a switching mechanism between subsystems corresponding to control modes of an automaton. Subsystems are constructed in such a way that they have the state vector as input (coming from the automaton's second output port) and compute the flow and jump functions (zero-crossing) and pass them back to the automaton block. The state variables are defined in the automaton block and the subsystems are static memory-less functions.
Suppose that a hybrid automaton consists of M control modes. The continuous-time dynamics in mode i is defined with DAE :

where i is in [1...M] and the dimension of x is N for any i in [1...M]. Suppose that in control mode i, there are Z_i jump conditions indicating jumps toward other modes. The jump conditions are defined by functions :

where j is in [1...Z_i]. When a jump function changes sign and becomes positive, a mode transition will happen. When k-th transition function becomes positive, a transition from mode "i" to mode "k" happens and state vector x is reset to :

In order to develop an automaton containing a mode with multiple reset functions, the value of the current and previous active modes might be useful. These values are available at the first output port of the block.
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
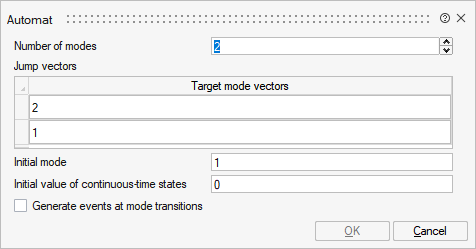
NMode | Number of modes | Number of modes used in the state chart that is defined by the automaton. | Number | |
jumps | Jump vectors | List of possible destination modes for each mode. | Structure | |
jumps/tmodev | Target mode vectors | Ordered list of destination modes for a given mode. For example, if in mode "i" (i-th line of this block parameter), and the list is composed of [j,k,m], and if the second zero-crossing of the i'th subsystem crosses the zero in the negative to positive direction, then a transition will occur from mode "i" to " k". | Cell of vectors | |
Minitial | Initial mode | Active mode at the initial time. | Scalar | |
X0 | Initial value of continuous-time states | State values at the initial time. | Vector | |
outevent | Generate events at mode transitions | Generates events when a jump function changes sign and becomes positive. A mode transition follows. | Number | 0 |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
Port 1 | explicit | Input vectors for the different modes (subsystems) of the model. The automaton block has M vector input ports corresponding to M modes or subsystems of the automaton. The input port i which is the output of the i-th subsystem is a vector of size 2*N+Zi. Each input is composed of several elements: the dynamic behavior of the model, the reset functions, and the transition functions for that mode.
The first N elements of the Input_i are the continuous-time dynamics. The dynamics of the system in the control mode i is described by a smooth index-1 DAE, i.e.,
The next N elements of Input_i are the values used to reset the continuous-time state when a transition to control mode i is activated. The next Z_i elements of Input_i are the jump or zero-crossing functions. If the j-th zero-crossing function of mode i crosses zero with negative to positive direction, a transition to j-th destination mode happens. When the control mode is i, all zero-crossing surfaces of that mode should have negative values. | input | NMode |
Port 2 | explicit | Output vector comoposed of the active mode and the previous mode. This output port is a vector of size two. The first element of this output is the current active mode and the second element is the previous modes, i.e.,
| output | 1 |
Port 3 | explicit | Output vector of the active subsystem. The second output port is a vector of size 2N. The first N element is the state vector and the second N element is the first time derivative of the state vector, i.e.,
| output | 2 |
Port 4 | activation | Whenever a mode transition happens, an event is trigered at this output event port. This event is useful when an event is needed to activate or initialize a part of the subsystem not included in the internal dynamics of the automaton block. | output | outevent |




Advanced Properties
| Name | Value | Description |
|---|---|---|
always active | yes | |
direct-feedthrough | no | |
zero-crossing | yes | |
mode | yes | |
continuous-time state | Depends on block parameters | |
discrete-time state | no |
Example
Several demo models are available in demo browser in folder Activate/Hybrid/Automaton.