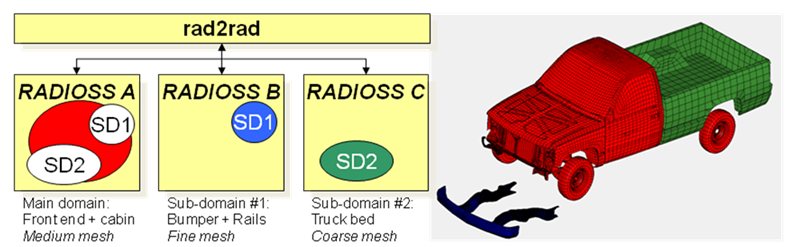
The Radioss runs are completely independent and do not communicate
directly with each other. Each subdomain uses its own time step as outlined
below:Figure 1.
The time step of each subdomain is arbitrary; but to allow the best gain in terms of speedup they should be significantly different from each other.
The best manual decomposition will be obtained by dividing global model into parts with a large number of elements having a big time step on one side, and a small number of elements with small time step on the other side.
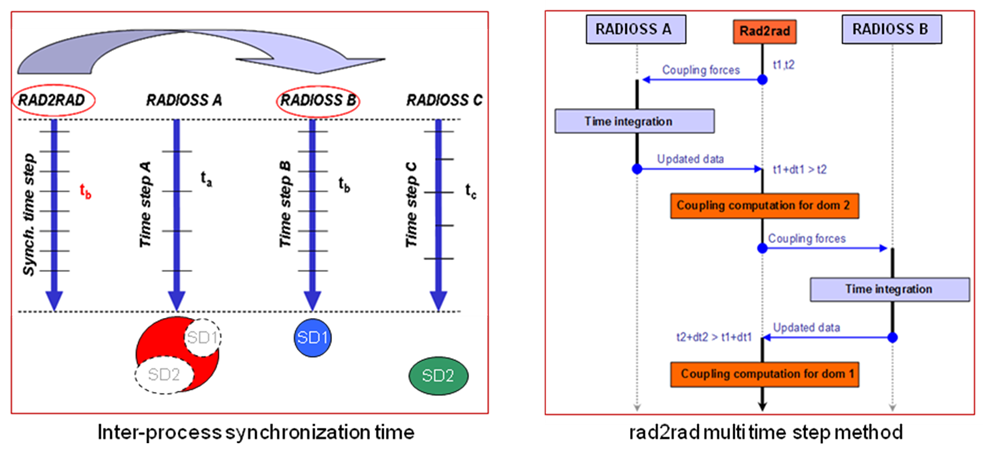
All communication, data transfers, time step synchronization, equilibrium and stability
conditions on the domain frontiers are assured by the main program.Figure 2.
New in 14.0
As of 14.0, Fluid-Structure Interaction simulations, including ALE and/or SPH are possible.
New in 13.0
As of 13.0, Multi-Domain is fully Hybrid-MPP compatible, that is, enabling multiple threading for
RAD2RAD.
Hints
For better computational performances:
The subdomain should be less than 30% of the full domain (main _
sub-domains) in terms of nodes or elements and the natural (or acceptable
mass scaling) time step ratio between subdomain and main domains should be
below 1/3.
Apply the same rule for pure Lagrange or FSI models, which is to put the
parts with a significantly smaller time step in the subdomain.
For pure Lagrange Multi-Domain models, the RAD2RAD workload must be
minimized as much as possible by reducing the communication flow between
domains, with this aim, contact interfaces and connections between sub and
main domains should be minimized as much as possible.
It is important to check that the subdomain is not part of a global contact
interface, but has its own subdomain self-impact and to create cross domain
contacts not larger than needed.
It is strongly recommended to symmetrize each created cross domain contact
interfaces.
For Multi-Domain with ALE or SPH, there is no need to minimize the contact
interfaces between fluid and structure.
For models with a subdomain having a relatively small amount of elements,
the number of allocated CPU should respect the empirical rule of at least
2000 element per CPU and it is advised to use the maximum possible number of
threads per node of the used cluster.
In one model, scattered parts with low time steps do not necessarily justify
multiple subdomains. If these parts have similar low time steps, they must
be put into one subdomain.
If connections between subdomains and main domains also have a small time
step, these connections should be part of the subdomain.
Subdomains essentially composed of Lagrange 3D elements, make the
Multi-Domain less efficient than if it was composed of 2D and 1D
elements.
For Multi-Domain FSI, it is advised to use the fluid in the main domain and
defined /DT/ALE with an elementary free time step with a
scaling factor of 0.5 for ALE. In the Langrange subdomain a nodal time step
/DT/NODA with a scaling factor of 0.9 should be
used.