The total displacement field for every point of a flexible body is obtained from the
displacement of a local frame defining the rigid motion of the body and from an
additional local displacement field corresponding to the small vibrations of the body.
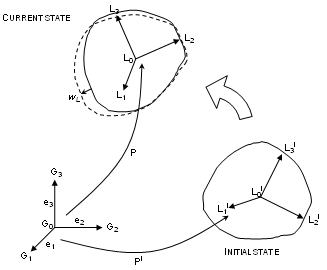
Figure 1.
(, , , and ) defines the global frame (, , and ).
(, , , and ) defines an orthonormal local frame.
is the rotation matrix from (, , , and ) to (, , , and ).
The total displacement, , can thus be expressed as:(1)
Where, , , , and are displacements of points , , , and , respectively,
, , and are coordinates in the local frame (, , , and )
is the rigid body contribution to the total
displacement
Local displacement is given by a combination of local vibration modes
:(2)
Where, is the vector of local modal contributions.
Rigid body displacement can also be expressed as a combination of 12
modes:(3)
Where the projection modes are obtained
from the local coordinates:(4)
The choice of the local frame (, , , and ) is fully arbitrary. These points do not need to be
input explicitly. Their locations define local coordinates and thus, the components
of the modes .
If the flexible body contains elements with rotational DOF, three additional modes
must be added to the family, accounting for the inertia associated with these DOF. The
components of these additional modes on each node of the flexible body having
rotational DOF are: (5)