Inputs
Introduction
The total number of user inputs is equal to 13.
Among these inputs, 7 are standard inputs and 6 are advanced inputs.
Standard inputs
Modes of computation
There are 2 modes of computation.
The “ Fast ” computation mode is the default one. It corresponds to a hybrid model which is perfectly suited for the pre-design step. Indeed, all the computations in the back end are based on magnetostatic finite element computations associated to Park transformation.
It evaluates the electromagnetic quantities with the best compromise between accuracy and computation time to explore the space of solutions quickly and easily.
The “ Accurate ” computation mode allows solving the computation with transient magnetic finite element modelling. This mode of computation is perfectly suited to the final design step because it allows getting more accurate results. It also computes additional quantities like the AC losses in winding, rotor iron losses and Joule losses in magnets.
Current definition mode
There are 2 common ways to define the electrical current.
Electrical current can be defined by the current density in electric conductors.
In this case, the current definition mode should be « Density ».
Electrical current can be defined directly by indicating the value of the line current (the rms value is required).
In this case, the current definition mode should be « Current ».
Line current, rms
When the choice of current definition mode is “ Current ”, the rms value of the line current supplied to the machine: “ Line current, rms” ( Line current, rms value ) must be provided.
Current density, rms
When the choice of current definition mode is “ Density ”, the rms value of the current density in electric conductors “ Current density, rms” (Current density in conductors, rms value) must be provided.
Note: The number of parallel paths and the winding connection are automatically considered in the results.
Control angle
Considering the vector diagram shown below, the “ Control angle ” is the angle between the electromotive force (E) and the electrical current (J) (ψ = (E, J)).
The default value is 45 degrees. It is an electrical angle. It must be set in a range of -90 to 90 degrees.
This range of values covers all the possible working points in the motor convention. The operating mode is displayed at the head of results.
Note: The sign of results like power depends on both the convention and the operating mode.
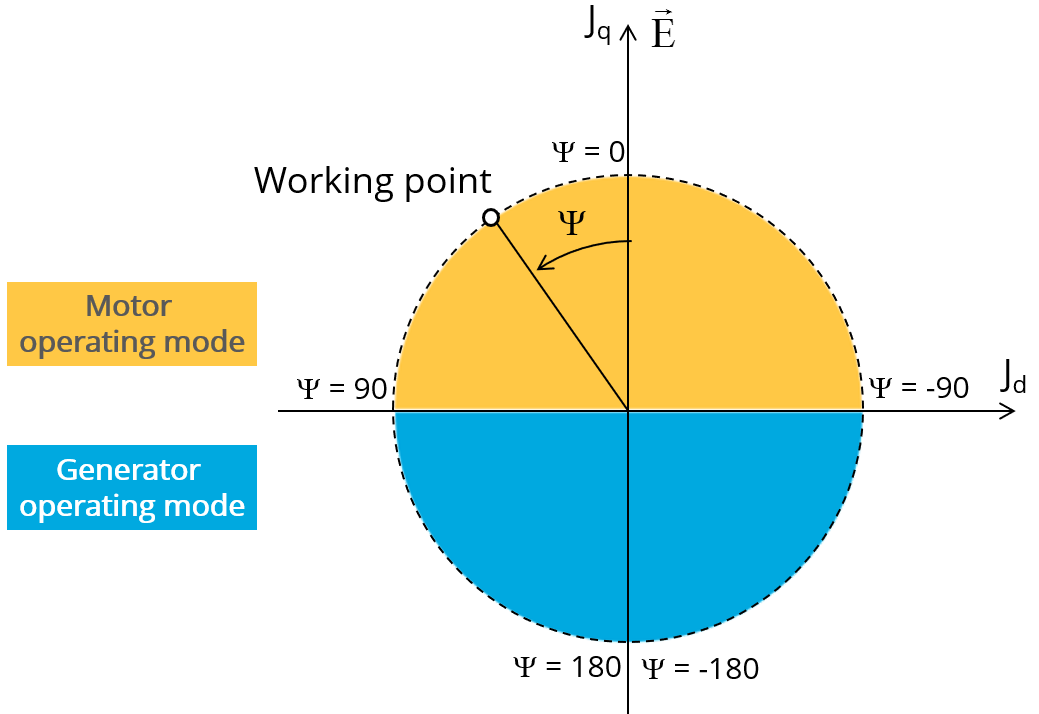 |
| Definition of the control angle Ψ - Motor convention |
Speed
The imposed “Speed” (Speed) of the machine must be set.
Rotor position dependency
AC losses analysis - Fast
The “AC losses analysis - Fast” (AC losses analysis required only while “Fast” computation mode and Rotor position dependency are selected) allows computing or not AC losses in stator winding. There are two available options:
None: AC losses are not computed. However, as the computation mode is “Fast” with rotor position dependency, a multi-static computation is performed without representing the solid conductors (wires) inside the slots. Phases are modeled with coil regions. Thus, the mesh density (number of nodes) is lower which leads to a lower computation time.
FE-Hybrid: AC losses in winding are computed without representing the wires (strands, solid conductors) inside the slots.
Since the location of each wire is accurately defined in the winding environment, sensors evaluate the evolution of the flux density close each wire. Then, a postprocessing based on analytical approaches computes the resulting current density inside the conductors and the corresponding Joule losses.
The wire topology can be “Circular” or “Rectangular”.
There can be one or several wires in parallel (in hand) in a conductor (per turn).
AC losses analysis - Accurate
The “AC losses analysis - Accurate” (AC losses analysis required only while “Accurate” computation mode is selected) allows computing or not AC losses in stator winding. There are three available options:
None: AC losses are not computed. However, as the computation mode is “Accurate”, a transient computation is performed without representing the solid conductors (wires) inside the slots. Phases are modeled with coil regions. Thus, the mesh density (number of nodes) is lower which leads to a lower computation time.
FE-One phase: AC losses are computed with only one phase modeled with solid conductors (wires) inside the slots. The other two phases are modeled with coil regions. Thus, AC losses in winding are computed with a lower computation time than if all the phases were modeled with solid conductors. However, this can have a little impact on the accuracy of results because we have supposed that the magnetic field is not impacted by the modeling assumption.
FE-All phase: AC losses are computed, with all phases modeled with solid conductors (wires) inside the slots. This computation method gives the best results in terms of accuracy, but with a higher computation time.
FE-Hybrid: AC losses in winding are computed without representing the wires (strands, solid conductors) inside the slots.
Since the location of each wire is accurately defined in the winding environment, sensors evaluate the evolution of the flux density close each wire. Then, a postprocessing based on analytical approaches computes the resulting current density inside the conductors and the corresponding Joule losses.
The wire topology can be “Circular” or “Rectangular”.
There can be one or several wires in parallel (in hand) in a conductor (per turn).
With FE-Hybrid option the recommended “Number of computed electrical periods” is equal to “1/2” whereas 2 computed electrical periods are needed for “FE-One phase” and for “FE-All phase” options.
Indeed, when solid conductors are represented in the Finite Element model (like with FE-One phase and FE-All phase options), there are transient phenomena to consider which leads to increase the “Number of computed electrical periods” to reach the steady state
With the “FE-Hybrid option”, the transient phenomena are handled by the analytical model, so, it is not necessary to increase the “Number of computed electrical periods” compared to a study with “None” options (without AC losses computation).
Additional losses
“Additional losses” input is not available in the current version (The input label is written in grey).
Advanced inputs
Number of computed electrical periods
The user input “No. computed elec. periods” (Number of computed electrical periods only required with “Accurate” computation mode or “Fast” computation mode with rotor position dependency activated) influences the accuracy of results especially in case of AC losses computation. Indeed, with represented conductors (AC losses analysis set to “FE - One phase” or “FE - All phase”) the computation may lead to have transient current evolution in wires requiring more than an electrical period of simulation to reach the steady state over an electrical period.
The default value is equal to 2. The minimum allowed value is 0.5 (recommended in “Accurate” mode with AC losses analysis set to “None” or “Hybrid” and “Fast” mode with rotor position dependency). The default value provides a good compromise between the accuracy of results and computation time.
Number of points per electrical period
The user input “No. points / electrical period” (Number of points per electrical period required only with “Accurate” computation mode) influences the accuracy of results (computation of the peak-peak ripple torque, iron losses, AC losses…) and the computation time.
The default value is equal to 40. The minimum recommended value is 20. The default value provides a good balance between accuracy of results and the computation time.
Rotor initial position
By default, the “Rotor initial position” is set to “Auto”.
When the “Rotor initial position mode” is set to “Auto”, the initial position of the rotor is automatically defined by an internal process of FluxMotor®. The resulting relative angular position corresponds to the alignment between the axis of the stator phase 1 (reference phase) and the direct axis of the rotor north pole.
When the “Rotor initial position” is set to “User input” (i.e. toggle button on the right), the initial position of the rotor to be considered for computation must be set by the user in the field « Rotor initial position ». The default value is equal to 0. The range of possible values is [-360, 360]. For more details, please refer to the document: MotorFactory_SMPM_IOR_3PH_Test_Introduction – section “Rotor and stator relative position”.
Skew model – Number of layers
Mesh order
To get the results, the original computation is performed using a Finite Element Modeling.
Two levels of meshing can be considered for this finite element calculation: first order and second order.
This parameter influences the accuracy of results and the computation time.
By default, second order mesh is used.
Airgap mesh coefficient
The advanced user input “Airgap mesh coefficient” is a coefficient which adjusts the size of mesh elements inside the airgap. When the value of “Airgap mesh coefficient” decreases, the mesh elements get smaller, leading to a higher mesh density inside the airgap, increasing the computation accuracy.
The imposed Mesh Point (size of mesh elements touching the points of the geometry), inside the Flux® software, is described as:
MeshPoint = (airgap) x (airgap mesh coefficient)
Airgap mesh coefficient is set to 1.5 by default.
The variation range of values for this parameter is [0.05; 2].
Convergence criteria on temperature
The advanced user input “Converg. Criteria on temperature” (Convergence criteria on temperature) is a percentage driving the convergence of the computation.
This advanced user input is available when the iterative thermal solving mode is selected in the thermal settings.
The iterative process (loop between electromagnetic and thermal computations) must run until the convergence criteria has been reached leading to the electromagnetic-thermal steady state. The convergence process is completed when the variation of temperature between two iterations gets lower than the ratio “Converg. Criteria on temperature” set in input.
Convergence criteria on temperature is set to 1.0 % by default.
The variation range of values for this percentage is ]0;10].
- The type of machine is Synchronous Machine with Permanent Magnets with Inner rotor (Thermal computations are available only for inner rotor machines)
- One of the two following thermal solving modes is selected: One iteration or iterative computation until convergence mode.