Add an Event
Add a ride event to a previously built model.
Nine standard events can be added to a half-car model using the Task Wizard. User-defined events for special tasks are also permitted and require the use and understanding of both MDL and the MotionSolve XML input deck. The following steps outline how to add a ride event.
-
From the Analysis menu, select Task Wizard to begin
adding an event to the model.
Figure 1. -
Select Static Ride Analysis for this model.
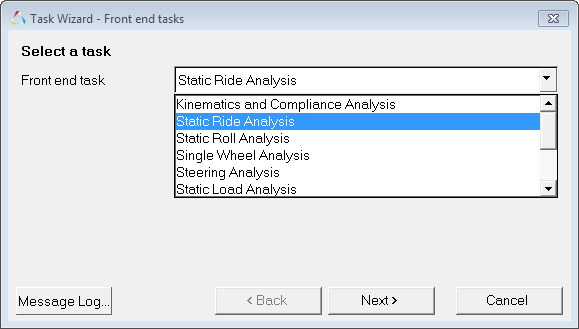
Figure 2.Note: Nine different events can be added for a front suspension model. -
Select Finish to complete the Task Wizard.
Figure 3. -
Add the requested information for the vehicle. This information is used to
calculate the Suspension Design Factors and can be modified later.
Note that a mechanism is now added to the model to create the ride travel in the suspension.
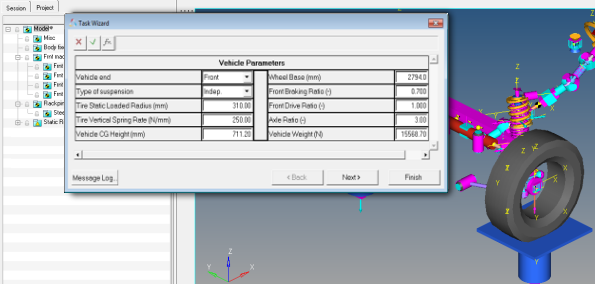
Figure 4. -
Add the distance that the suspension will travel during the event in jounce and
rebound. The steering wheel is held fixed in this event.
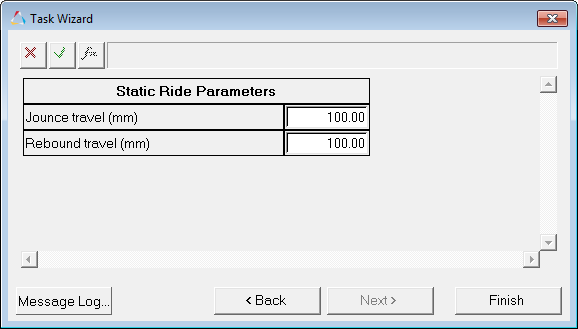
Figure 5.The Static Ride Analysis event appears in the browser as the final System/Analysis.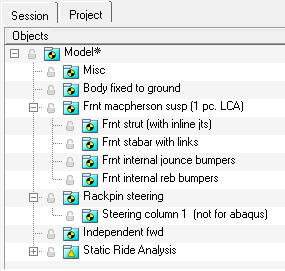
Figure 6.The Static Ride Analysis event has a variety of MotionView modeling elements in it to create the ride event.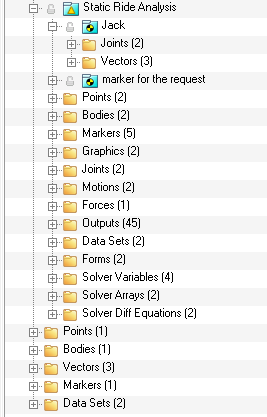
Figure 7.Suspension Design Factors are created by the event. These factors are used to evaluate the performance of the suspension. They are automatically created to match the topology of the suspension being analyzed.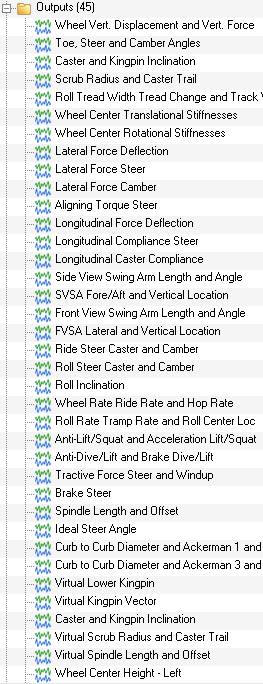
Figure 8.