
Vehicle
Simple vehicle model
![]()
Library
Modelica/Mechanics/Translational/Components
Description
This is a simple model of a ground vehicle, comprising the mass, the aerodynamic drag, the rolling resistance andthe inclination resistance (caused by the road grade).For all particular resistances, significant variables can be either given by a parameter or input by a time-variable signal.
The vehicle can be driven at the rotational flange flangeR, e.g. by an electric motor and a gearbox.It is possible to use the vehicle as a passive trailer, leaving the rotational flange flangeR unconnected.
At the translational flange flangeT the vehicle can be coupled with another vehicle,e.g. as a trailer or to pull a trailer.It is possible to leave the translational flange flangeT unconnected.
The velocity v and the driven distance s of the vehicle are provided as variables;the vehicle can be initialized using these variables.
Mass and inertia
Both the translational vehicle mass and the rotational inertias (e.g. the wheels)are accelerated when the vehicle is accelerated.This nature is usually put into account for fundamental vehicle analysesdone either in the rotational or translational domain, e.g. when analysingvehicle's driveline.Then, the vehicle mass m can be expressed as an additionalequivalent inertia J_eq = m * R2 orvice versa rotational inertia J as an additionalequivalent mass m_eq = J/R2,where R is the wheel radius.Since this model introduces rolling resistance and inclination resistance as wellwhere just the vehicle mass plays a role,the approach of equivalent mass/inertia would lead to incorrect simulation resultsand shall therefore not be applied here.
Drag resistance
fDrag = Cd*rho*A*(v - vWind)^2/2
Wind velocity is measured in the same direction as velocity of flangeT.Wind velocity is either constant or prescribed by the input vWind.
Rolling resistance
fRoll = Cr*m*g*cos(alpha)
Rolling resistance coefficient Cr is either constantor prescribed by the input cr.Rolling resistance has a crossover from positive to negative velocity within [-vReg, vReg].
The inclination angle α is either constant or prescribed bythe input inclination = tan(α).This corresponds to the road rise over running distance of 100 m which,in general, is written as a percentage.For example for a road rising by 10 m over 100 m thegrade = 10 % and, thus, the parameterinclinationConstant = 0.1.Positive inclination means driving uphill, negative inclination meansdriving downhill, in case of positive vehicle velocity.
Inclination resistance
fGrav = m*g*sin(alpha)
With the inclination angle α described above.
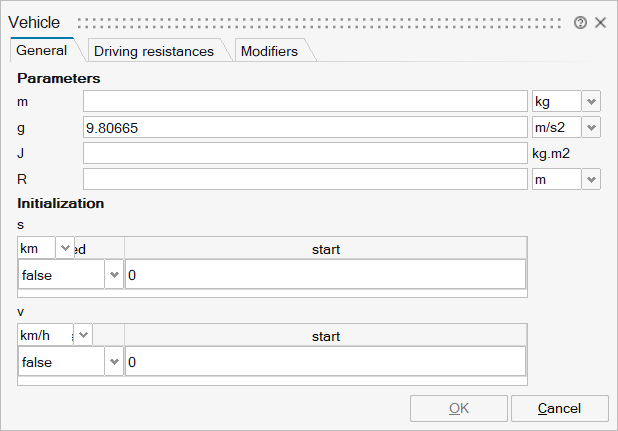
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_m | m | Total mass of vehicle | Scalar | |
mo_g | g | Constant gravity acceleration | Scalar | |
mo_J | J | Total rotational inertia of drive train | Scalar | |
mo_R | R | Wheel radius | Scalar | |
mo_s | s | s | Structure | |
mo_s/fixed | fixed | Cell of scalars | true | |
mo_s/start | start | Cell of scalars | ||
mo_v | v | v | Structure | |
mo_v/fixed | fixed | Cell of scalars | true | |
mo_v/start | start | Cell of scalars |
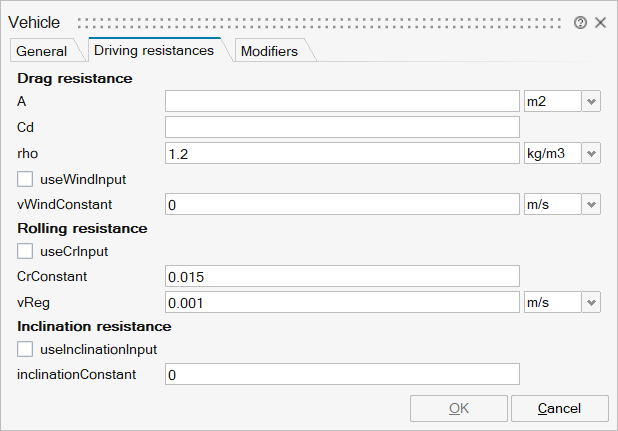
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_A | A | Cross section of vehicle | Scalar | |
mo_Cd | Cd | Drag resistance coefficient | Scalar | |
mo_rho | rho | Density of air | Scalar | |
mo_useWindInput | useWindInput | Enable signal input for wind velocity | Number | 0 |
mo_vWindConstant | vWindConstant | Constant wind velocity | Scalar | |
mo_useCrInput | useCrInput | Enable signal input for Cr | Number | 0 |
mo_CrConstant | CrConstant | Constant rolling resistance coefficient | Scalar | |
mo_vReg | vReg | Velocity for regularization around 0 | Scalar | |
mo_useInclinationInput | useInclinationInput | Enable signal input for inclination | Number | 0 |
mo_inclinationConstant | inclinationConstant | Constant inclination = tan(angle) | Scalar |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo__nmodifiers | Number of Modifiers | Specifies the number of modifiers | Number | |
mo__modifiers | Modifiers | Add new modifier | Structure | |
mo__modifiers/varname | Variable name | Cell of strings | 'a' | |
mo__modifiers/attribute | Attribute | Cell of strings | 'start' | |
mo__modifiers/value | Value |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
flangeT | implicit | Translational flange | output | 1 |
flangeR | implicit | Rotational flange | input | 1 |
Port 3 | implicit | Inclination=tan(angle) | input | mo_useInclinationInput |
Port 4 | implicit | Rolling resistance coefficient | input | mo_useCrInput |
Port 5 | implicit | Wind velocity | input | mo_useWindInput |