 Package HydraulicsByFluidon.Components.Motors
Package HydraulicsByFluidon.Components.MotorsIcon for standard packages
Package HydraulicsByFluidon.Components.Motors
Standard package icon.
Extends from Modelica.Icons.Package (Icon for standard packages).
| Name | Description |
|---|---|
HydroMotor | |
VariableHydroMotor |
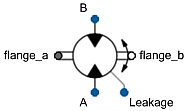
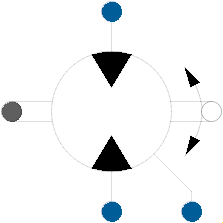 Model HydraulicsByFluidon.Components.Motors.HydroMotor
Model HydraulicsByFluidon.Components.Motors.HydroMotor
Model of a hydro motor with fixed displacement volume and losses.
The main parameters of the motor are its Displacement volume and the Rotational moment of inertia.
The losses are parameterised by providing volumetric and mechanical efficiencies Volumetric efficiency and Mechanical efficiency for a given operating point. The operating point is characterised by a reference pressure difference Reference pressure difference and a corresponding shaft speed Reference speed. Based on the entered values, the parameters of a laminar throttle (volumetric losses) and a linear damper (representing the mechanical losses) are determined automatically. Unlike the efficiencies, the parameters of these two elements typically do not vary significantly with the operating conditions.
The parameter Ratio external Leakage / total Leakage allows to split the leakage between internal and external leakage. A gear pump e. g. typically has no external leakage, Ratio external Leakage / total Leakage has to be set to 0. In contrast, a piston pump has a significant external leakage (0.5 < Ratio external Leakage / total Leakage <= 1).
Extends from HydraulicsByFluidon.Components.Base.PartialHydroMotor.
| Type | Name | Default | Description |
|---|---|---|---|
Volume | dispVolume | 5e-5 | Displacement volume |
Inertia | Jrot | 0.05 | Rotational moment of inertia |
Volume | deadVolume | 1e-6 | Dead volume at ports |
Efficiency | etaVol | 0.94 | Volumetric efficiency @ nRef, dpRef |
Density | leakageReferenceDensity | 860 | Reference density for volumetric efficiency |
DimensionlessRatio | ratioLeakageExtern | 0 | Ratio external Leakage / total Leakage |
Boolean | useLeakagePort | false | Enable leakage port, otherwise implicitly connected with tank |
Efficiency | etaHm | 0.98 | Mechanical efficiency @ nRef, dpRef |
Real | nRef | 1000 | Reference speed (1/min) |
AbsolutePressure | dpRef | 2e+7 | Reference pressure difference |
StateSelect | stateSelect | StateSelect.prefer | Priority to use phi and w as states |
Boolean | forwardFluidProperties | true | Forward fluid properties between ports |
| Type | Name | Description |
|---|---|---|
FluidPort | fluidPortA | Hydraulic port A |
FluidPort | fluidPortB | Hydraulic port B |
Flange_a | flange_a | |
Flange_b | flange_b | |
FluidPort | fluidPortLeakage | Hydraulic port Leakage |
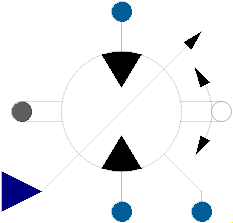 Model HydraulicsByFluidon.Components.Motors.VariableHydroMotor
Model HydraulicsByFluidon.Components.Motors.VariableHydroMotor
Model of a hydro motor with variable displacement volume and losses.
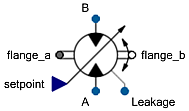
The main parameters of the motor are its maximum Displacement volume and the Rotational moment of inertia. The displacement volume can be adjusted by using the setpoint signal:
| setpoint = 0 | Displacement volume = 0 |
| setpoint > 1 | Displacement volume = Displacement volume sign(w) = sign(fluidPortA.mFlow) |
| setpoint < -1 | Displacement volume = Displacement volume sign(w) = -sign(fluidPortA.mFlow) |
| 1 > setpoint > 0 | Displacement volume = Displacement volume * setpoint sign(w) = sign(fluidPortA.mFlow) |
| -1 < setpoint < 0 | Displacement volume = Displacement volume * setpoint sign(w) = -sign(fluidPortA.mFlow) |
The losses are parameterised by providing volumetric and mechanical efficiencies Volumetric efficiency and Mechanical efficiency for a given operating point. The operating point is characterised by a reference pressure difference Reference pressure difference and a corresponding shaft speed Reference speed. Based on the entered values, the parameters of a laminar throttle (volumetric losses) and a linear damper (representing the mechanical losses) are determined automatically. Unlike the efficiencies, the parameters of these two elements typically do not vary significantly with the operating conditions.
The parameter Ratio external Leakage / total Leakage allows to split the leakage between internal and external leakage. A gear pump e. g. typically has no external leakage, Ratio external Leakage / total Leakage has to be set to 0. In contrast, a piston pump has a significant external leakage (0.5 < Ratio external Leakage / total Leakage <= 1).
Extends from HydraulicsByFluidon.Components.Base.PartialHydroMotor.
| Type | Name | Default | Description |
|---|---|---|---|
Volume | dispVolume | 5e-5 | Displacement volume |
Inertia | Jrot | 0.05 | Rotational moment of inertia |
Volume | deadVolume | 1e-6 | Dead volume at ports |
Efficiency | etaVol | 0.94 | Volumetric efficiency @ nRef, dpRef |
Density | leakageReferenceDensity | 860 | Reference density for volumetric efficiency |
DimensionlessRatio | ratioLeakageExtern | 0 | Ratio external Leakage / total Leakage |
Boolean | useLeakagePort | false | Enable leakage port, otherwise implicitly connected with tank |
Efficiency | etaHm | 0.98 | Mechanical efficiency @ nRef, dpRef |
Real | nRef | 1000 | Reference speed (1/min) |
AbsolutePressure | dpRef | 2e+7 | Reference pressure difference |
StateSelect | stateSelect | StateSelect.prefer | Priority to use phi and w as states |
Boolean | forwardFluidProperties | true | Forward fluid properties between ports |
| Type | Name | Description |
|---|---|---|
FluidPort | fluidPortA | Hydraulic port A |
FluidPort | fluidPortB | Hydraulic port B |
Flange_a | flange_a | |
Flange_b | flange_b | |
FluidPort | fluidPortLeakage | Hydraulic port Leakage |
input RealInput | setpoint |