
튜토리얼: Motion Analyst 시작
튜토리얼 레벨: 초급커넥션을 생성하고, 모터 및 스프링 댐퍼 힘을 추가하고, 유연체를 생성하고, 모션 해석을 실행하는 방법을 알아봅니다.
다음 사항에 대해 학습합니다.
- 파트 접지
- 강체 그룹 작성
- 조인트로 파트 연결
- 중력 방향 결정
- 모델에 모션 추가
- 스프링-댐퍼 힘 적용
- 유연체 추가
- 유연체 응력 검토
- 모션 해석 실행
CAD 모델 열기
- 메뉴 모음에서 를 선택합니다.
-
작업 디렉토리로 이동하여 M01_FourBar.x_t를 선택하고 열기를 클릭합니다.
모델링 창에서 모델이 열립니다.

- 모델 브라우저가 아직 표시되지 않은 경우에는 F2를 눌러 모델 브라우저를 엽니다.
- 표시 단위가 MKS로 설정되어 있는지 확인하십시오.
- 파일 > 환경설정 > Inspire Motion > 실행 옵션에서 솔버 단위를 MKS로 변경합니다.
-
Motion Analyst 리본으로 전환하려면 프로파일에서 드롭다운을 클릭하고 애널리스트를 선택합니다.

파트 접지
-
모션 리본의 연결 범주에서 지면 도구를 선택합니다.

-
접지할 베이스 파트를 선택합니다.
파트가 빨간색으로 바뀌고, 모델 브라우저의 파트 아이콘
 이 변경되면서 지면 파트임을 알려줍니다.
이 변경되면서 지면 파트임을 알려줍니다.
- 마우스 오른쪽 버튼으로 클릭하고 확인 표시로 이동해서 종료하거나 마우스 오른쪽 버튼을 두 번 클릭하십시오.
강체 그룹 작성
-
강체 그룹 도구를 선택합니다.

-
메커니즘의 하단에서 베이스, Mount Crank 및 Mount Clevis 파트를 선택합니다.
파트는 선택할 때 빨간색으로 변합니다.

-
부동 새 그룹 생성 아이콘을 클릭해서 선택된 파트를 새 강체 그룹에 배치합니다.

- 마우스 오른쪽 버튼으로 클릭하고 확인 표시로 이동해서 종료하거나 마우스 오른쪽 버튼을 두 번 클릭하십시오.
단순 모션 해석 실행
-
모션 해석 도구의 빠른 실행 버튼을 클릭해서 모션 상태의 모델을 확인합니다.

-
지면 파트는 움직이지 않는 상태로 남아 있고 연결되지 않은 일부 파트는 중력으로 인해 떨어집니다.
주: 빠른 실행은 토글 버튼이기 때문에 현재 실행 중인 해석을 중지시키기 위해서도 사용 가능합니다.
-
해석이 실행을 중지되면
 아이콘이 나타나고 자동으로 검토 모드로 들어갑니다. 모션 결과 검토 아이콘을 클릭하거나 마우스 오른쪽 버튼을 두 번 클릭해서 검토 모드를 종료합니다.
아이콘이 나타나고 자동으로 검토 모드로 들어갑니다. 모션 결과 검토 아이콘을 클릭하거나 마우스 오른쪽 버튼을 두 번 클릭해서 검토 모드를 종료합니다.

조인트로 파트 연결
-
Motion Analyst 리본에서 조인트 도구를 선택합니다.

기본 조인트 유형으로 회전 및 파트 1 수집기가 미리 선택된 조인트 대화 상자가 표시됩니다. - 모델링 창에서 Link Crank 파트를 클릭합니다.
- Mount Crank 파트를 클릭합니다.
-
Mount Crank 구멍의 중앙에서 스냅 점을 클릭합니다.
그림 1. 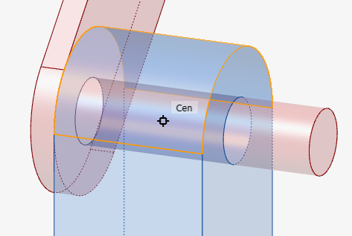
- 방향을 정의하려면 방법 옆의 드롭다운을 선택하고 벡터를 선택합니다.
- 벡터 수집기에서 고급 선택기 ...를 클릭합니다.
- 고급 선택기 창에서 글로벌 Y를 선택하고 확인을 클릭합니다.
-
수락(
 )을 클릭하여 조인트를 생성합니다.
)을 클릭하여 조인트를 생성합니다.
-
마우스 오른쪽 버튼으로 클릭하고 확인 표시로 이동해서 종료하거나 마우스 오른쪽 버튼을 두 번 클릭하십시오.
주:
- 수락을 클릭한 후 컨텍스트는 편집 모드로 유지되며, 편집 모드에서는 대화 상자에서 해당 수집기를 먼저 클릭한 다음, 모델링 창에서 엔티티를 선택하여 조인트 정의를 자유롭게 변경할 수 있습니다.
- 지오메트리 스냅 점을 사용하여 원점, 점 또는 벡터와 같은 엔티티를 정의하면 모델에 새 엔티티가 생성됩니다. 이러한 새 엔티티는 다른 조인트, 힘, 모션 등을 정의하기 위한 참조로 재사용될 수 있습니다.
- 수집기에 엔티티가 이미 채워져 있는 경우 해당 엔티티를 클릭하면 모델링 창에서 엔티티(파트, 점 또는 벡터)가 강조 표시되어 시각적으로 명확하게 확인할 수 있습니다.
-
모델링 창을 마우스 왼쪽 버튼으로 클릭하여 모든 수집기를 재설정하고 새 조인트 생성을 시작합니다.
라벨은 1씩 자동 인덱싱되어 이제 조인트 1로 표시됩니다.
-
3~8단계를 반복하고 Link Crank와 Link Single Slot 파트 사이에 회전 조인트를 추가합니다. 원점을 정의할 때 그림과 같이 구멍 중앙 스냅 점을 사용합니다.
그림 2. 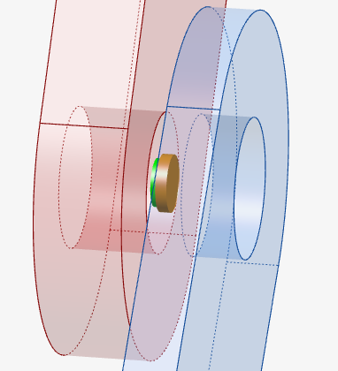
-
3~8단계를 반복하고 Link Single Slot과 Link Dual Slot 사이에 회전 조인트를 추가합니다.
그림 3. 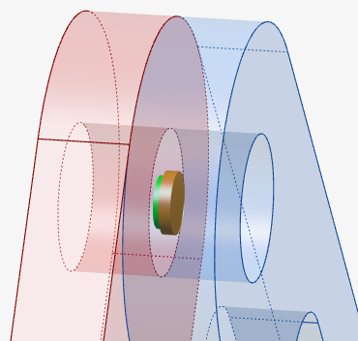
-
3~8단계를 반복하고 Link Dual Slot과 Mount Clevis 파트 사이에 회전 조인트를 추가합니다.
그림 4. 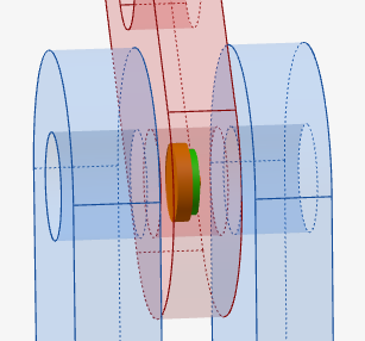
주: 조인트 그래픽의 스케일 인자는 애널리스트 조인트에 대한 환경설정 > Inspire Motion > 시각화 > 스케일링 인자에서 변경할 수 있습니다. 이미지에서 조인트의 스케일은 65로 조정되었습니다.
중력 방향 검사
-
중력 도구 열기:
-
모션 리본의 면에서 중력 도구를 선택합니다.

중력이 표시되지 않으면 힘 도구 아래에서 드롭다운을 사용합니다.기본적으로 중력 가속도(G)는 -z 방향에 대해 9.80665 m/s2로 설정됩니다.
드롭다운을 사용합니다.기본적으로 중력 가속도(G)는 -z 방향에 대해 9.80665 m/s2로 설정됩니다.
-
모션 리본의 면에서 중력 도구를 선택합니다.
-
중력의 방향을 나타내는 벡터가 표시되는 것에 유의하십시오.
그림 6. 
- 마우스 오른쪽 버튼으로 클릭하고 확인 표시로 이동해서 종료하거나 마우스 오른쪽 버튼을 두 번 클릭하십시오.
실행 설정 변경 및 해석 재실행
-
모션 해석 도구 위로 마우스를 이동한 다음, 실행 설정 아이콘을 클릭해서 [모션 해석 실행] 창을 엽니다.

-
필드에 값을 입력하거나 100 버튼을 클릭해서 출력 속도를 100으로 변경합니다.
그림 7. 
-
중력 섹션을 확장하고 예 라디오 버튼이 선택되어 있는지 확인합니다.
이것은 모션 해석의 환경설정입니다.

- 모션 해석 실행 창을 닫습니다.
-
모션 해석 도구의 빠른 실행 버튼을 클릭해서 조인트 커넥션이 있는 모델의 이동을 확인합니다.
그림 8. 
- 계속을 클릭합니다.
-
빠른 실행 버튼을 클릭해서 해석을 다시 중지합니다.

- 마우스 오른쪽 버튼을 두 번 클릭해서 검토 모드를 종료합니다.
메커니즘을 구동할 모션 추가
-
모션 도구를 선택합니다.

- 대화 상자에서 모션 정의를 조인트 사용으로 설정합니다.
- 유형을 속도로 설정합니다.
- Mount Crank 및 Link Crank를 연결하는 조인트를 클릭합니다.
-
수락()을 클릭하여 모션을 생성합니다.
마이크로 대화 상자와 함께 조인트에 대한 회전 화살표 그래픽도 표시됩니다.
그림 9. 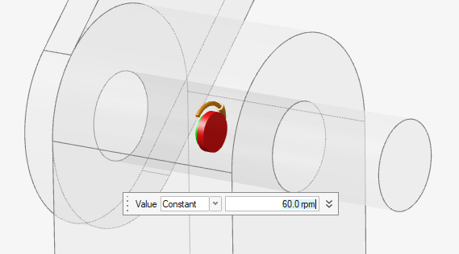
- 표시되는 마이크로 대화 상자에 60rpm을 입력합니다.
스프링-댐퍼 힘 추가
-
코일 스프링 도구를 선택합니다.

- Link Dual Slot 파트를 선택합니다.
- 베이스 파트를 선택합니다.
-
Link Dual Slot 파트의 중앙점(중앙) 엣지 스냅 점을 클릭합니다.
선택된 피처가 빨간색으로 변합니다.
그림 10. 
-
베이스 파트의 중앙점(중앙) 엣지 스냅 점을 클릭합니다.
그림 11. -
수락()을 클릭하여 스프링 생성합니다.
코일 스프링이 나타나고 마이크로 대화 상자가 기본 설정값을 표시합니다.
-
표시되는 마이크로 대화 상자에서 K 경직도 값을 2500 N/m으로 변경하고 C 감쇠를 1 N*s/m으로 변경합니다. 힘 및 길이 옵션은 기본값으로 유지합니다.
그림 12. 
-
흰색 화살표 조작기를 클릭하고 끌어서 스프링 직경을 .01m으로 줄입니다.

- 마우스 오른쪽 버튼으로 클릭하고 확인 표시로 이동해서 종료하거나 마우스 오른쪽 버튼을 두 번 클릭하십시오.
실행 설정 변경 및 해석 재실행
-
실행 설정 아이콘을 클릭합니다.
- 필드에 값을 입력하거나 2 버튼을 클릭해서 종료 시간을 2초로 변경합니다.
- 창을 닫습니다.
-
빠른 실행 버튼을 클릭한 다음, 중복 구속조건 메시지 대화 상자에서 계속을 클릭하여 모델의 움직임을 확인합니다.
- 2초 후에 실행이 완료되고 자동으로 모션 결과 검토 도구로 들어갑니다.
- 선택 사항: 애니메이션 툴바에서 재생 버튼을 클릭해서 결과를 검토합니다.
- 마우스 왼쪽 버튼을 클릭하고 스와이프하여 애니메이션 컨텍스트를 종료합니다.
모션 유연체 생성
모델에서 중복 구속조건을 제거하는 한 가지 선호되는 방법은 강체 대신 유연체를 사용하는 것입니다. 이 4개 바 예제에서는 링크 중 하나만 교체하면 시스템의 중복을 제거할 수 있습니다.
- Link single slot을 마우스 오른쪽 버튼으로 클릭합니다.
-
패널에서 모션용 유연체를 선택합니다.
파트가 하늘색으로 바뀝니다.
그림 13. 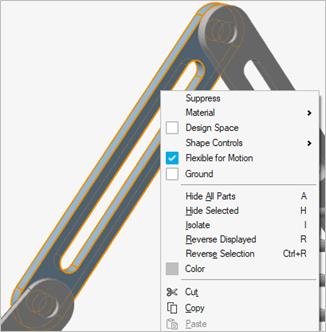
모션 해석 다시 실행
-
빠른 실행 버튼을 클릭합니다.
그림 14. 
- 2. 시뮬레이션이 완료되면 실행 상태 창에서 닫기를 클릭합니다.
-
Motion Analyst 리본의 검토 도구에서 드롭다운 메뉴를 클릭합니다.
-
유연체 결과 검토 도구를 선택합니다.
그림 15. 
해석 결과 탐색기가 표시됩니다. - 해석 결과 탐색기에서 결과 유형을 VonMises 응력으로 변경합니다.
- 색상 범례에서 범례의 최대값(8e5 Pa)을 클릭하고 7e5를 입력합니다(응력 윤곽을 더 잘 보기 위해).
-
애니메이션 슬라이더를 끌어 놓아서 애니메이션을 재생하고 메커니즘 이동 중에 응력 변경을 확인합니다.
그림 16. 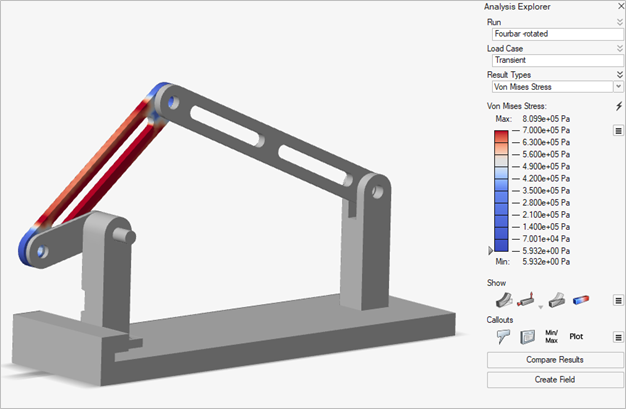
- 왼쪽 버튼을 클릭하고 스와이프하여 해석 결과 탐색기를 종료합니다.
모션 결과 플롯
-
모션 해석 아이콘 옆에 있는 파란색 확인 표시(모션 결과 검토)를 클릭합니다.

-
슬라이더 바를 끌어 놓아서 애니메이션 툴바의 시간을 0.73초로 변경합니다.
그림 17. 
-
모델링 창에서 코일 스프링 0을 선택해서 스프링 힘의 플롯을 확인합니다.
그림 18. 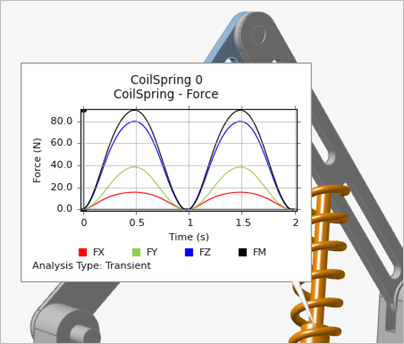
-
모델 브라우저에서 모션 0을 선택해서 모션 출력의 플롯을 확인합니다.
그림 19. 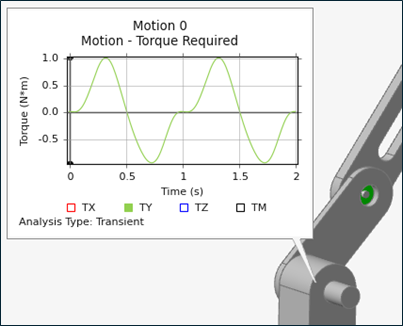
- 모션 플롯에서 TX, TZ 및 TM을 클릭하여 숨기고 TY만 표시합니다.
-
모델 브라우저에서 Link Single Slot을 Link Dual Slot으로 연결하는 핀을 클릭하여 핀에 대한 힘 플롯을 확인합니다.
그림 20. 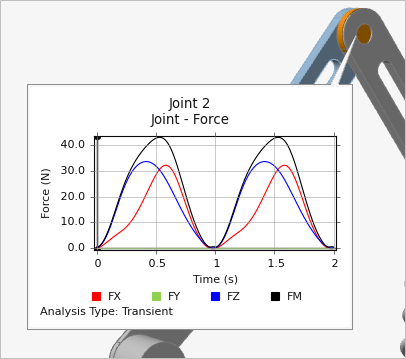
주: 플롯을 마우스 오른쪽 버튼으로 클릭해서 플롯될 수 있는 다른 요소를 표시합니다. - 마우스 오른쪽 버튼으로 클릭하고 확인 표시로 이동해서 종료하거나 마우스 오른쪽 버튼을 두 번 클릭하십시오.