Journal Bearings#
- class AlignedJournalBearing(**kwds)#
- Creates a journal bearing that can overtake radial loads.
The AlignedJournalBearing is a combination of a force element and optionally, a planar or inplane joint. The force element is a function of bearing dimensions, relative radial displacement, and velocity, as well as rotational velocity between the inner journal and outer bearing. The force can act only radially between the inner journal and outer bearing and does not account for tilting and axial misalignment.
The journal bearing is defined by the following dimensions:
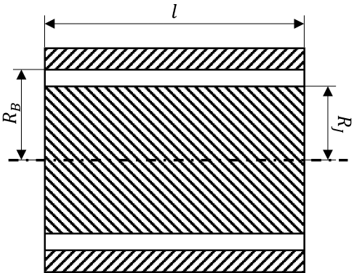
Aligned Journal Bearing Geometry.#
Example
Connect two parts with an aligned journal bearing.#from msolve import * from msolve.machinery.journal_bearings.journal_bearings import AlignedJournalBearing model = Model(output="aligned_journal_bearing") ground = Part(ground=True) global_ref = Marker(body=ground) Units(mass="KILOGRAM", length="MILLIMETER", time="SECOND", force="NEWTON") Accgrav(kgrav=-9.81) marker_0 = Marker(body=ground, qp=[0,0,0], zv=[0,0,1], xv=[1,0,0]) part_0 = Part(ip=[5,5,5,0,0,0], mass=0.001, cm=Marker(qp=[0,0,0], zv=[0,0,1], xv=[1,0,0])) jt_bearing_rev = Joint(type="REVOLUTE", i=part_0.cm.id, j=global_ref.id) mot_driver = Motion(joint=jt_bearing_rev.id, dtype="VELOCITY", icdisp=0.0, function="STEP(TIME,0,0,1,1)") ajb = AlignedJournalBearing(rm=marker_0, bearing=part_0, journal=ground, mu=5e-08, width=40.0, rb=15.015, rj=15.0, method="gumbel_short", internal_connection_type="INPLANE", lubrication_force_graphics=True, contact=True, contact_stiffness=1000.0, contact_exponent=2.1, contact_damping=0.1, contact_dmax=0.1)
Name
Type
Symbol
Required
Default
Modifiable
Bool
True
\(\checkmark\)
Reference -
Body\(\checkmark\)
Bool
True
Double
0.1
Double
0.1
Double
2.1
Double
1000
Double
1
Int
Auto
Int
0
Str
INPLANE
Reference -
Body\(\checkmark\)
Str
Bool
False
Enum
Double
0.0
Int
7
Str
Int
20
Int
0
Reference -
MarkerDouble
\(R_{B}\)
0.0
Double
\(R_{J}\)
0.0
Reference -
Marker\(\checkmark\)
Double
\(l\)
0.0
- active#
Defines the state of the object.
Type=Bool, Default=True, Modifiable
- bearing#
The part that acts as the bearing.
Type=Reference (Body), Required
- contact#
A flag that initiates Impact contact between journal and bearing graphics.
Type=Bool, Default=True
- contact_damping#
Damping property of IMPACT contact element.
Type=Double, Default=0.1
- contact_dmax#
dmax property of IMPACT contact element.
Type=Double, Default=0.1
- contact_exponent#
Exponent property of IMPACT contact element.
Type=Double, Default=2.1
- contact_stiffness#
Stiffness property of IMPACT contact element.
Type=Double, Default=1000
- force_graphics_scale#
A scale for the visualization of the lubrication force graphics vector.
Type=Double, Default=1
- id#
The id of the object.
Type=Int
- inner_connection_flex_node#
Type=Int, Default=0
- internal_connection_type#
The type of joint used to constrain the journal and the bearing together, so the formulation is applied correctly.
Type=Str, Default=INPLANE
- journal#
The part that acts as the journal.
Type=Reference (Body), Required
- label#
The label of the composite element.
Type=Str
- lubrication_force_graphics#
A flag that creates 3D lubrication force vectors at discrete points around the journal circumference.
See Comment 3.
Type=Bool, Default=False
- method#
The hydrodynamic lubrication type that defines the expressions for the hydrodynamic forces.
See Comment 2.
Type=Enum
Permitted values are:
dynamic_gumbel_long
dynamic_gumbel_short
gumbel_long
gumbel_short
sommerfeld_long
sommerfeld_short
- mu#
The lubricant fluid dynamic viscosity.
Type=Double, Default=0.0
- na#
The number of axial segments used for the misaligned journal bearing GFOSUB, force vector graphics and Max pressure/ MOFT REQSUB.
See Comment 5.
Type=Int, Default=7
- name#
Defines a nametag for the object.
Type=Str
- nr#
The number of radial segments used for the misaligned journal bearing GFOSUB, force vector graphics and Max pressure/ MOFT REQSUB.
See Comment 5.
Type=Int, Default=20
- outer_connection_flex_node#
Type=Int, Default=0
- rb#
The bearing radius.
Type=Double, Default=0.0
- rj#
The journal radius.
Type=Double, Default=0.0
- rm#
The reference marker of the composite element.
Type=Reference (Marker), Required
- width#
The journal bearing axial width.
Type=Double, Default=0.0
- class MisalignedJournalBearing(**kwds)#
- Creates a journal bearing that can overtake radial loads and misaligned moments.
The MisalignedJournalBearing is a combination of a force element and optionally, an inplane joint. The force element is a function of bearing dimensions, relative radial, and angular displacement and the velocity between the inner journal and outer bearing. The force element applies radial forces and alignment moments between the inner journal and outer bearing. It does not account for axial misalignment.
The journal bearing is defined by the following dimensions:
Misaligned Journal Bearing Geometry.#
Example
Connect two parts with a misaligned journal bearing.#from msolve import * from msolve.machinery.journal_bearings.journal_bearings import MisalignedJournalBearing model = Model(output="misaligned_journal_bearing") ground = Part(ground=True) global_ref = Marker(body=ground) Units(mass="KILOGRAM", length="MILLIMETER", time="SECOND", force="NEWTON") Accgrav(kgrav=-9.81) marker_0 = Marker(body=ground, qp=[0,0,0], zv=[0,0,1], xv=[1,0,0]) part_0 = Part(ip=[5,5,5,0,0,0], mass=0.001, cm=Marker(qp=[0,0,0], zv=[0,0,1], xv=[1,0,0])) jt_bearing_rev = Joint(type="REVOLUTE", i=part_0.cm.id, j=global_ref.id) mot_driver = Motion(joint=jt_bearing_rev.id, dtype="VELOCITY", icdisp=0.0, function="STEP(TIME,0,0,1,1)") mjb = MisalignedJournalBearing(rm=marker_0, bearing=part_0, journal=ground, mu=5e-08, width=40.0, rb=15.015, rj=15.0, method="gumbel_short", internal_connection_type="INPLANE", lubrication_force_graphics=True, contact=True, contact_stiffness=1000.0, contact_exponent=2.1, contact_damping=0.1, contact_dmax=0.1)
Name
Type
Symbol
Required
Default
Modifiable
Bool
True
\(\checkmark\)
Reference -
Body\(\checkmark\)
Bool
True
Double
0.1
Double
0.1
Double
2.1
Double
1000
Double
1
Int
Auto
Int
0
Str
INPLANE
Reference -
Body\(\checkmark\)
Str
Bool
False
Enum
Double
0.0
Int
7
Str
Int
20
Int
0
Reference -
MarkerDouble
\(R_{B}\)
0.0
Double
\(R_{J}\)
0.0
Reference -
Marker\(\checkmark\)
Double
\(l\)
0.0
- active#
Defines the state of the object.
Type=Bool, Default=True, Modifiable
- bearing#
The part that acts as the bearing.
Type=Reference (Body), Required
- contact#
A flag that initiates Impact contact between journal and bearing graphics.
Type=Bool, Default=True
- contact_damping#
Damping property of IMPACT contact element.
Type=Double, Default=0.1
- contact_dmax#
dmax property of IMPACT contact element.
Type=Double, Default=0.1
- contact_exponent#
Exponent property of IMPACT contact element.
Type=Double, Default=2.1
- contact_stiffness#
Stiffness property of IMPACT contact element.
Type=Double, Default=1000
- force_graphics_scale#
A scale for the visualization of the lubrication force graphics vector.
Type=Double, Default=1
- id#
The id of the object.
Type=Int
- inner_connection_flex_node#
Type=Int, Default=0
- internal_connection_type#
The type of joint used to constrain the journal and the bearing together, so the formulation is applied correctly.
Type=Str, Default=INPLANE
- journal#
The part that acts as the journal.
Type=Reference (Body), Required
- label#
The label of the composite element.
Type=Str
- lubrication_force_graphics#
A flag that creates 3D lubrication force vectors at discrete points around the journal circumference.
See Comment 3.
Type=Bool, Default=False
- method#
The hydrodynamic lubrication type that defines the expressions for the hydrodynamic forces.
See Comment 2.
Type=Enum
Permitted values are:
gumbel_short
sommerfeld_short
- mu#
The lubricant fluid dynamic viscosity.
Type=Double, Default=0.0
- na#
The number of axial segments used for the misaligned journal bearing GFOSUB, force vector graphics and Max pressure/ MOFT REQSUB.
See Comment 5.
Type=Int, Default=7
- name#
Defines a nametag for the object.
Type=Str
- nr#
The number of radial segments used for the misaligned journal bearing GFOSUB, force vector graphics and Max pressure/ MOFT REQSUB.
See Comment 5.
Type=Int, Default=20
- outer_connection_flex_node#
Type=Int, Default=0
- rb#
The bearing radius.
Type=Double, Default=0.0
- rj#
The journal radius.
Type=Double, Default=0.0
- rm#
The reference marker of the composite element.
Type=Reference (Marker), Required
- width#
The journal bearing axial width.
Type=Double, Default=0.0