MV-8100:タイヤモデリング
本チュートリアルでは、MBD-Vehicle Dynamics ToolsプリファレンスファイルのMotionViewでの読み込み、タイヤモデルの構築、MotionSolveでのモデルの実行およびシミュレーション結果の確認を行う方法について学びます。
このチュートリアルの目的は、MotionViewインターフェースでタイヤモデルを構築し、結果を解釈するためのプロセスを示すことです。
タイヤモデルは、ホイールと路面の間のインターフェースを表現します。このタイヤインターフェースでは、タイヤのパラメータとプロパティは拡張子(.tir)のタイヤプロパティファイルによって設定され、路面インターフェースは拡張子(.rdf)の路面プロパティファイルによって記述されます。タイヤのインターフェースを定義するには、1つのボディ、1つのポイント、および2つのマーカーを結合する必要があります。これに加え、無荷重半径、アスペクト比、幅、質量、慣性モーメントなどのタイヤの物理的なプロパティを指定する必要があります。
プリファレンスファイルの読み込み
このステップでは、MotionViewを起動し、MBD-Vehicle Dynamics Toolsプリファレンスファイルを読み込みます。
AutoTireエンティティを構築するにはまず、MotionViewでMBD-Vehicle Dynamics Toolsプリファレンスファイルを読み込む必要があります。一度読み込まれると、MotionViewは、アプリケーションを起動するたびにMBD-Vehicle Dynamics Tools環境設定ファイルを記憶し、自動的にロードされます。
-
新しいMotionViewセッションを開始します。
図 1. 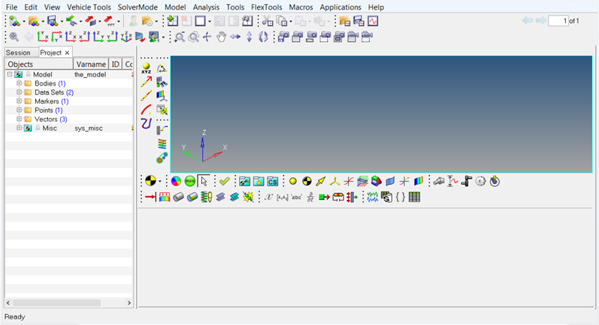
-
menu barでをクリックし、Preferencesを開きます。
図 2. 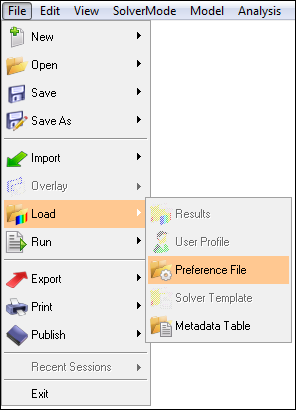
-
MBD-Vehicle Dynamics Toolsを選択し、Loadをクリックします。
図 3. 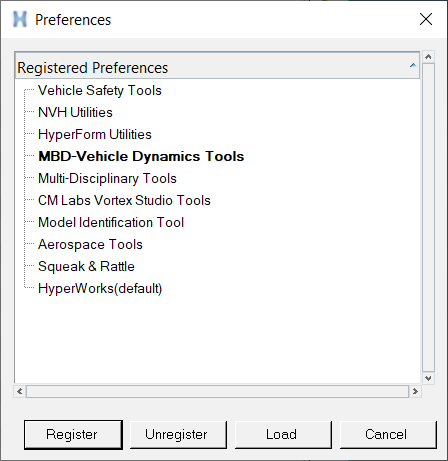
モデルへのポイントの追加
このステップでは、ポイントをモデルに追加します。
-
Project Browserで、Pointsフォルダーを右クリックし、context menuからAdd
Pointを選択します。
図 4. 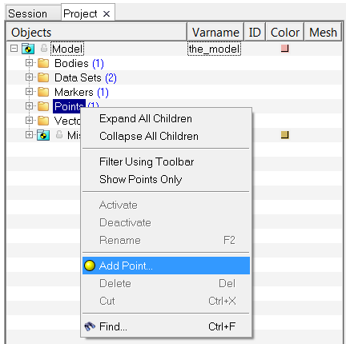
Add Point or PointPairダイアログが表示されます。 - LabelにWheel CMと入力します。
- Variableにp wheel cmと入力します。
-
OKをクリックします。
図 5. 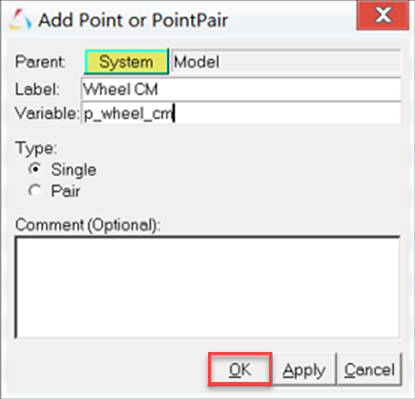
Wheel CMポイントがProject Browserで追加されます。図 6. 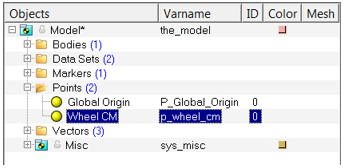
-
PointsパネルのPropertiesタブで、Z座標として313と入力します。
図 7. 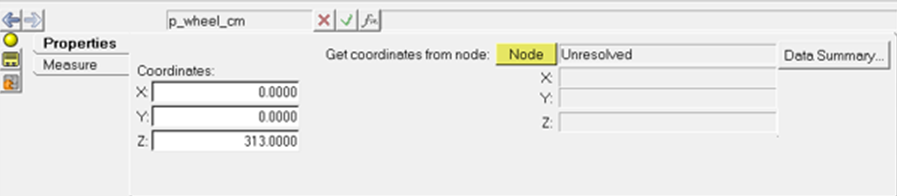
モデルへのHubボディの追加
このステップでは、モデルにボディを追加し、Hubボディの中心を定義します。
-
Project Browserで、Bodiesフォルダーを右クリックし、context menuからAdd
Bodyを選択します。
図 8. 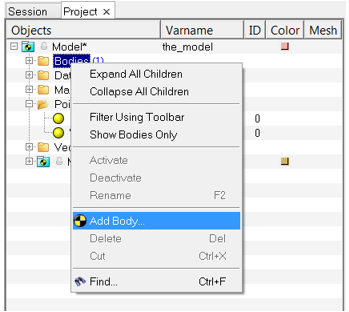
Add Body or BodyPairダイアログが開きます。 - LabelにHubと入力します。
- Variableにb_hubと入力します。
-
OKをクリックします。
図 9. 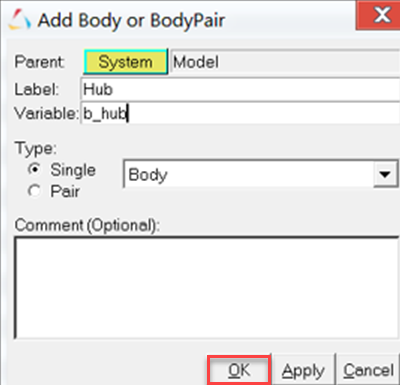
HubボディがProject Browserに追加されます。図 10. 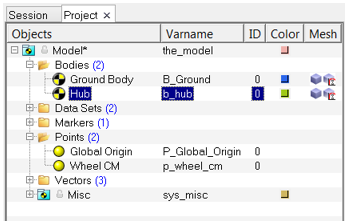
-
Bodyパネルで、CM Coordinatesタブをクリックし、Use center of mass coordinate systemチェックボックスを選択します。
図 11. 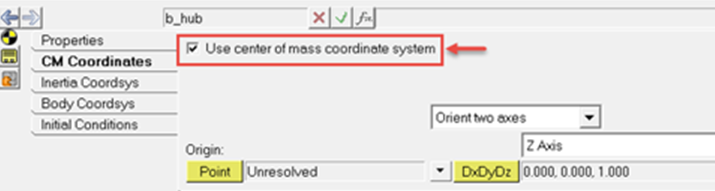
-
Pointコレクターボタンをダブルクリックします。
図 12. 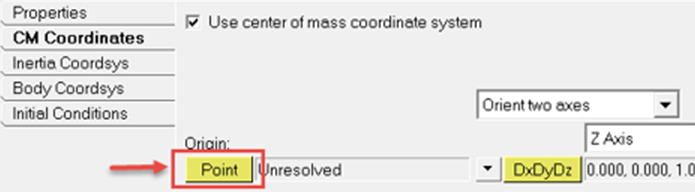
Select a Pointダイアログが開きます。 -
Wheel CMポイントを選択し、OKをクリックします。
図 13. 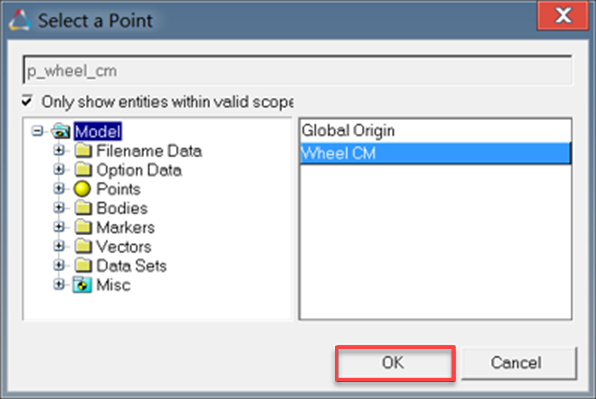
ホイールの中心が、Hubボディの中心として使用されます。図 14. 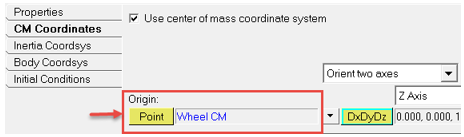
Hubボディの質量および慣性プロパティの更新
このステップでは、Hubボディの質量と慣性プロパティを更新します。
- BodyパネルのPropertiesタブで、Massプロパティに380と入力します。
- Inertia propertiesセクションで、lxxに1.0000e+14と入力します。
- lyyに2.0000e+14と入力します。
-
lzzに1.0000e+14と入力します。
ヒント: Hubボディの質量と慣性プロパティは図 15と一致するはずです。
図 15. 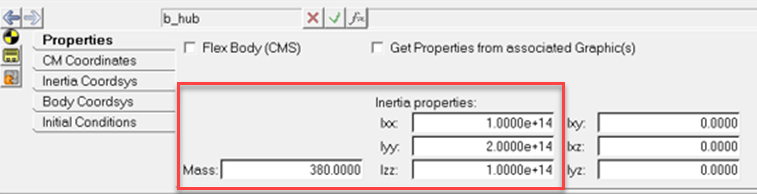
Hubボディの初期条件の設定
このステップでは、Hubボディの初期条件を設定します。
- Initial Conditionsタブをクリックします。
- Translational velocityセクションで、Vxに2.0000e+04と入力します。
- Vyに1000と入力します。
- Vzに0と入力します。
- Rotational velocityセクションで、Wxに0と入力します。
- Wyに65と入力します。
-
Wzに0と入力します。
ヒント: Hubボディの初期条件は図 16と一致するはずです。
図 16. 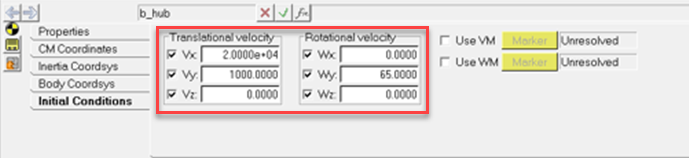
注: Hubボディに付与されるこれらの初期条件は、前向きの初速Vxが20000mm/s、回転が65rad/sであるタイヤ+リムを表します。
モデルへのマーカーの追加
このステップでは、マーカーをモデルに追加します。
-
Project Browserで、Markersフォルダーを右クリックし、context menuからAdd
Markerを選択します。
図 17. 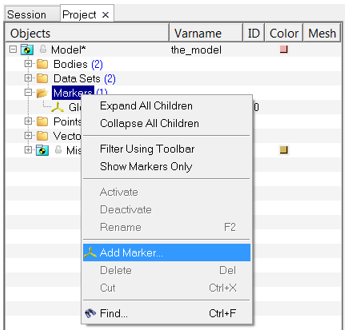
Add Marker or MarkerPairダイアログが開きます。 - LabelにTire Reference Markerと入力します。
- Variableにm_tire_refと入力します。
-
OKをクリックします。
図 18. 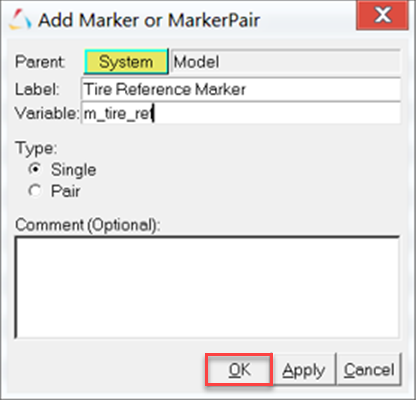
Tire Reference MarkerがProject Browserに追加されます。図 19. 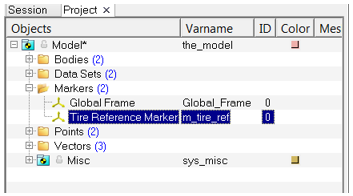
-
図 20に示すとおり、MarkersパネルのPropertiesタブで、BodyにHubを選択し、OriginにWheel CMを選択します。
図 20. 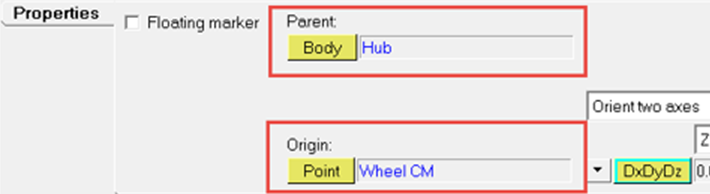
マーカーのアタッチメントが定義されます。
モデルへのAutoTireエンティティの追加
このステップでは、autotireエンティティをモデルに追加します。
-
Project BrowserでModelを右クリックし、context menuからAdd Auto
Entityを選択します。
図 21. 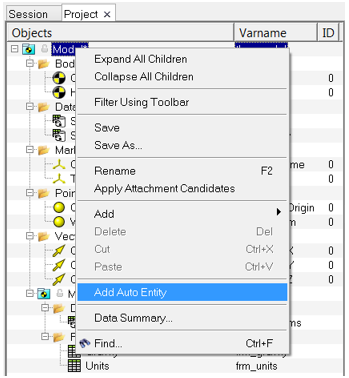
Add Entityダイアログが開きます。 -
ドロップダウンメニューからAutoTireを選択し、OKをクリックします。
図 22. 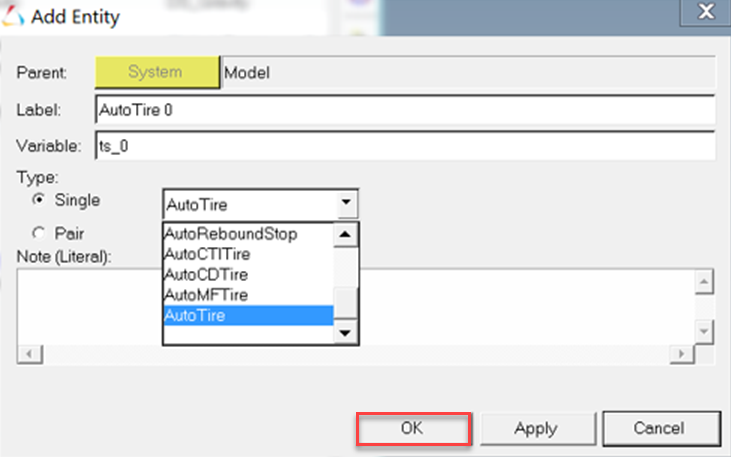
AutoTireパネルがパネル領域に表示され、Project Browserに自動車用エンティティが作成されます。図 23. 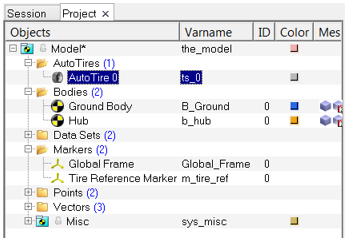
-
Connectivityタブで、図 24に示すとおり、Hub BodyにHub、Wheel CenterにWheel CM、Tire MarkerにTire Reference
Marker、Road MarkerにGlobal Frameを選択します。
図 24. 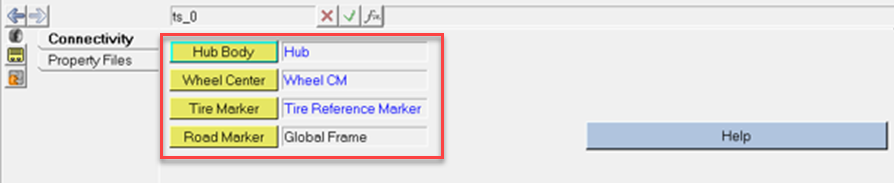
注: AutoTireはHub Body、Wheel Center、Tire Marker、Road Markerによって定義されます。- Hub Body
- タイヤ力が作用するホイールボディ。
- Wheel Center
- タイヤが結合されるポイント。
- Tire Marker
- タイヤ力が作用する方向を指定する参照マーカー。
- Road Marker
- 道路の参照マーカーは、シミュレーションでの路面の配置と向きの基準となるマーカーです。
タイヤインターフェースが定義され、モデルがmodeling windowに表示されます。図 25. 
-
Property Filesタブを使って、タイヤのプロパティを確認します。
図 26. 
AutoTireエンティティは、Tire Propertyファイルを編集することによりユーザーが希望に沿ってタイヤプロパティを修正することを可能にします。
グラフィックのタイヤの表現は、Unloaded Radius、Tire Width、Aspect RatioおよびHub Offsetなどのプロパティフィールドを編集することで修正できます。タイヤプロパティファイルが読み込まれたら、フィールドの一部は自動的に入力されます。
注: エンティティフィールドの値を変更しても、プロパティファイル内の値は変更されません。これらのエンティティフィールドは、タイヤのグラフィックを作成するためのものです。Edit Fileボタンを使ってファイルに変更を加えたい場合は、別の名称でファイルを保存し、再読み込みします。そうすることで、グラフィックの属性がグラフィカルユーザーインターフェース内で自動的に満たされます。
MotionSolveでのモデルの実行
このステップでは、MotionSolveでモデルを実行します。
- モデルをAuto-Tire.mdlとして保存します。
-
 (Run Solver)をクリックし、MotionSolve入力の名称をAuto-Tire.xmlに変更します。
(Run Solver)をクリックし、MotionSolve入力の名称をAuto-Tire.xmlに変更します。
- TypeドロップダウンメニューからStatic + Transientを選択します。
-
Print intervalに0.001と入力します。
図 27. 
-
Run ボタンをクリックします。
モデルがMotionSolve,で実行されると、View Log、AnimateおよびPlotボタンが有効になります。これらのボタンで、結果のプロット、アニメーションを確認、または表形式での結果の検証を行うことができます。
解析結果の表示
このステップでは、タイヤモデルの解析結果を確認します。
-
Plot ボタンをクリックします。
プロットが右のウィンドウ内に表示されます。
図 28. 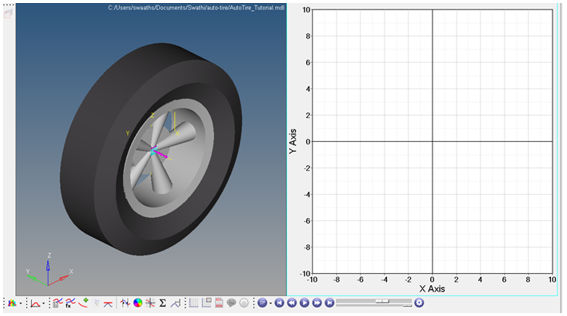
-
プロットウィンドウ内の任意の場所をクリックし、ツールバーから
 (Expand/Reduceボタン)をクリックします。
プロットウィンドウが展開します。
(Expand/Reduceボタン)をクリックします。
プロットウィンドウが展開します。

- REQ/70000007 Auto Tire0 – Radius OmegaActual OmegaFree
-
- f2 - Radius – タイヤのロール半径
- f3 - OmegaActual – タイヤの角速度
- f4 - OmegaFree – タイヤがスリップ率0の際の角速度
図 30. 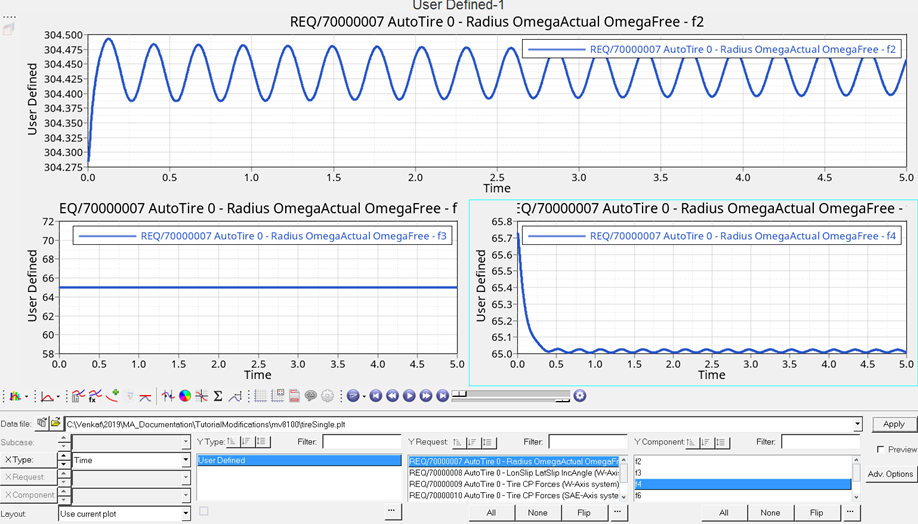
- REQ/70000008 Auto Tire0 – lonSlip latSlip IncAngle
- 下記の出力が、ISO座標系およびSAE座標系で用意されます。プロットで示されているのはISO座標系のものです。
- f2 - LonSlip - スリップ率または縦方向スリップ(%)この場合、タイヤは自由に回転しているため、スリップ率はほぼ0です。
- f3 - LatSlip - 横方向スリップはVyとVx.の比で、0.05から始まります。ここでは、Vy/Vx = 1000/20000 = 0.05
- f4 - IncAngle – タイヤのXZプレーンからの傾斜角
図 31. 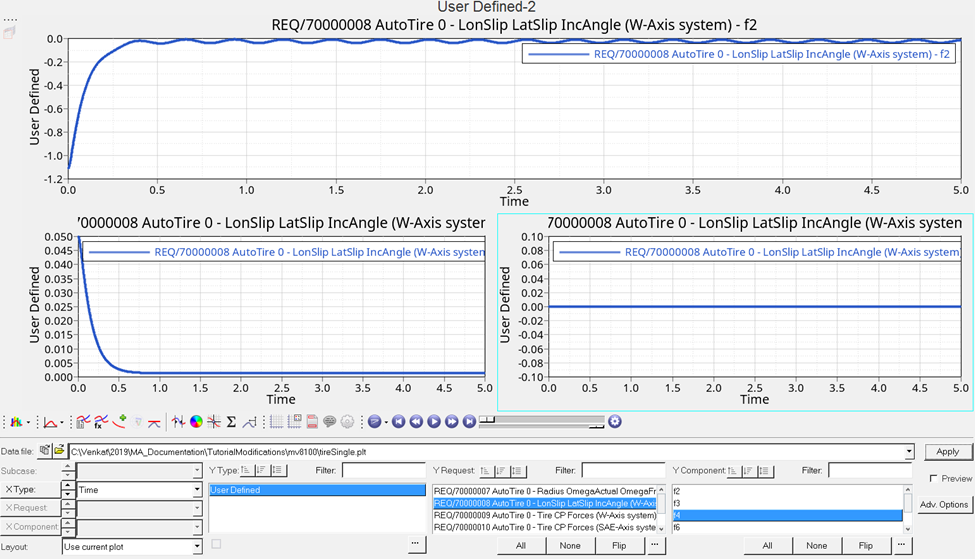
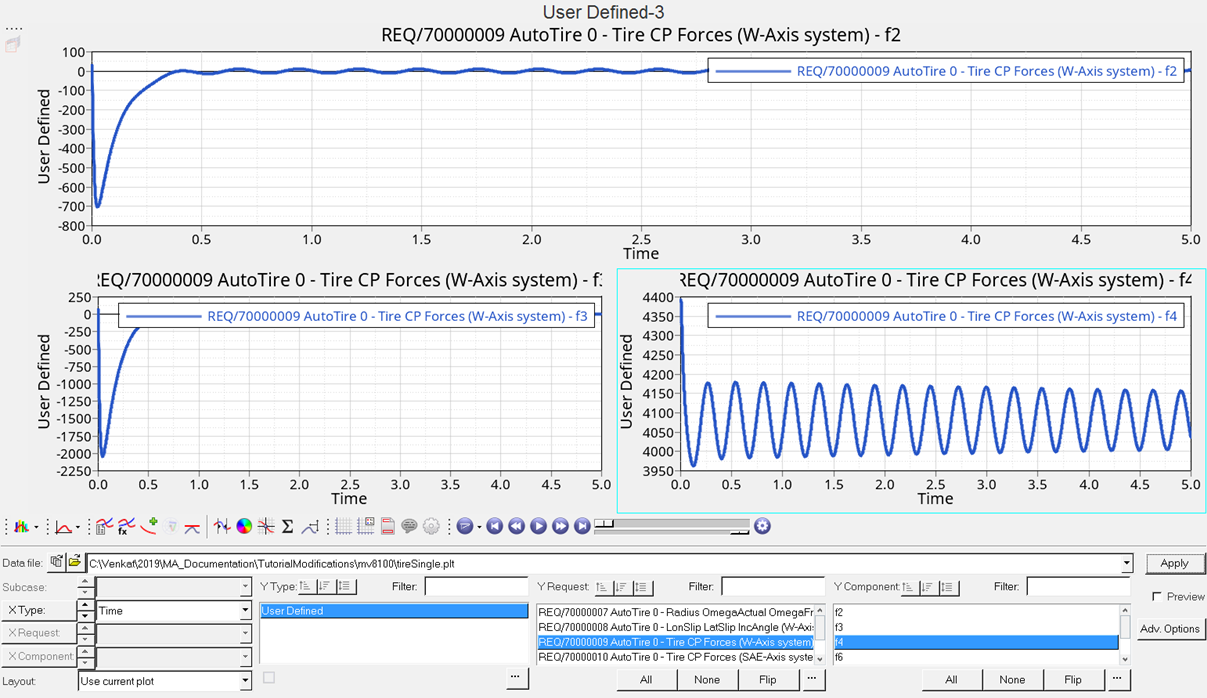
- REQ/70000009 Auto Tire0 – Tire CP Forces (W-Axis system)
- タイヤの接触パッチでのフォースはWおよびSAE軸系で使用できます。プロットで示されているのは W-axis系のものです。
図 32.