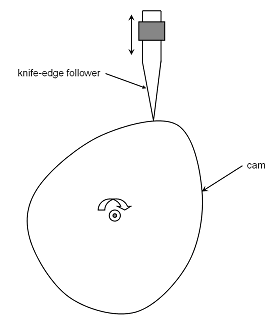
MV-1025:点-曲線(PTCV)高次ペア拘束の構築
本チュートリアルでは、PTCV(点-曲線)ジョイントをモデル化する方法について学習します。
ポイントの作成
このステップでは、モデルにポイントを作成します。
-
新しいMotionViewセッションを開始します。
デフォルトの単位(kg、mm、s、N)を使用します。
-
以下のいずれかの方法で、Add Point or PointPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Point)アイコンを右クリックします。
(Point)アイコンを右クリックします。
- LabelにPivotPointと入力します。デフォルトの識別子を受諾します。
- OKをクリックします。
- Propertiesタブをクリックし、X、Y、Z座標値を0.0と指定します。
-
手順2から5までを繰り返し、表 1に指定したポイントを作成します。
表 1. Point X Y Z FollowerCM 0.0 65.557 0.0 FollowerPoint 0.0 25.0 0.0 FollowerJoint 0.0 85.0 0.0 CamCM 0.0 -14.1604 0.0
ボディの作成
このステップでは、CamボディとFollowerを作成します。
-
以下のいずれかの方法で、Add Body or BodyPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Body)アイコンを右クリックします。
(Body)アイコンを右クリックします。
-
CamボディとFollowerを追加します。
-
各ボディのパネルのPropertiesタブで、表 2に示す情報を指定します。
表 2. Body Mass Ixx Iyy Izz Ixy Iyz Izx Cam 0.174526 60.3623 63.699 123.276 0.0 0.0 0.0 Follower 0.0228149 7.10381 0.219116 7.22026 0.0 0.0 0.0 注: Get Properties from associated Graphic(s) チェックボックスをオフにします。 -
Camボディについて、CM Coordinateタブの設定を指定します。
- Use center of mass coordinate systemボックスをチェックします。
-
 をダブルクリックします。
をダブルクリックします。
- Select a Pointダイアログで、CamCMを選択します。
- OKをクリックします。
- 軸の方向のプロパティについては、デフォルトの設定を受諾します。
-
Followerボディについて、CM Coordinateタブの設定を指定します。
- Use CM Coordsysボックスをチェックします。
-
をダブルクリックします。
- Select a Pointダイアログで、FollowerCMを選択します。
- OKをクリックします。
- 軸の方向のプロパティについては、デフォルトの設定を受諾します。
ジョイントの作成
このステップでは、モデルに必要な回転ジョイントと並進ジョイントを定義します。
-
以下のいずれかの方法で、Add Joint or JointPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Constraintsツールバーで、
 (Joints)アイコンを右クリックします。
(Joints)アイコンを右クリックします。
-
CamPivotジョイントを作成します。
- Add Joint or JointPairで、LabelにCamPivotと入力します。
- TypeにRevolute Jointを選択します。
- OKをクリックします。
-
Connectivityタブで
 をダブルクリックし、Camとします。
をダブルクリックし、Camとします。
-
 をGround Bodyとし、OKをクリックします。
をGround Bodyとし、OKをクリックします。
-
Connectivityタブでをダブルクリックし、PivotPointとします。
-
Alignment Axisを
 に変更します。VectorをGlobal
Zにします。
に変更します。VectorをGlobal
Zにします。
-
FollowerJointを作成します。
- Add Joint or JointPairで、LabelにFollowerJointと入力します。
- TypeにTranslational Jointを選択します。
- OKをクリックします。
-
Connectivityタブでをダブルクリックし、Followerとします。
-
をGround Bodyとし、OKをクリックします。
-
Connectivityタブでをダブルクリックし、FollowerJointとします。
-
Alignment Axisをに変更します。VectorをGlobal
Yとし、OKをクリックします。
マーカーの作成
このステップでは、PTCVジョイントの定義に必要なマーカーを定義します。
-
以下のいずれかの方法で、Add Marker or MarkerPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Marker)アイコンを右クリックします。
(Marker)アイコンを右クリックします。
-
CamMarkerを作成します。
- Add Marker or MarkerPairダイアログで、LabelにCamMarkerと入力します。
- OKをクリックします。
-
Propertiesタブで
 をダブルクリックしてCamとし、OKをクリックします。
をダブルクリックしてCamとし、OKをクリックします。
-
Propertiesタブでをダブルクリックし、PivotPointとします。
- OKをクリックします。軸の方向については、デフォルトの設定を受諾します。
-
FollowerMarkerを作成します。
- Add Marker or MarkerPairダイアログで、LabelにFollowerMarkerと入力します。
- OKをクリックします。
-
PropertiesタブでをダブルクリックしてFollowerとし、OKをクリックします。
-
Propertiesタブでをダブルクリックし、FollowerPointとします。
- OKをクリックします。軸の方向については、デフォルトの設定を受諾します。
グラフィックスの作成
このステップでは、CamとFollowerのグラフィックスを読み込み、モデル内のジョイントについてもグラフィックスを作成します。
-
以下のいずれかの方法で、Add Graphics or GraphicPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Graphics)アイコンを右クリックします。
(Graphics)アイコンを右クリックします。
- ダイアログで、LabelにCamと入力します。
-
ドロップダウンメニューからFileをクリックします。
図 2. 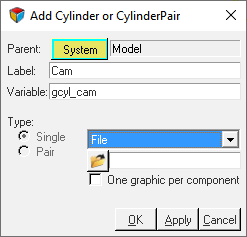
-
 (File Browser)アイコンをクリックし、モデルフォルダーからCamProfile.h3dを開きます。
(File Browser)アイコンをクリックし、モデルフォルダーからCamProfile.h3dを開きます。
- OKをクリックします。
-
Connectivityタブでをダブルクリックし、グラフィックスをCamボディとします。
- 手順1を繰り返し、もう一つのグラフィックスを作成します。LabelにFollowerと入力します。
- ドロップダウンメニューからFileをクリックします。
-
(File Browser)アイコンをクリックし、モデルフォルダーからFollowerProfile.h3dを開きます。
- OKをクリックします。
-
Connectivityタブでをダブルクリックし、グラフィックスをFollowerボディとします。
-
表 3にリストされているスペックを用いて、モデル内のカムピボットについて、シリンダーグラフィックスを作成します。
表 3. ラベル Type Direction( )PivotGraphicOne Cylinder Ground Body PivotPoint Global Z PivotGraphicTwo Cylinder Cam PivotPoint Global Z - Project BrowserでPivotGraphicOneをクリックします。
-
Propertiesタブで、表 4にリストされている値を指定します。
表 4. Property 値 Length 7.5 Offset -3.75 Radius 1 4.000 Radius 2 4.000 - CapのプロパティにCap Both Endsを選択します。
- Project BrowserでPivotGraphicTwoをクリックします。
-
Propertiesタブで、表 5にリストされている値を指定します。
表 5. Property 値 Length 7.6 Offset -3.8 Radius 1 2.000 Radius 2 2.000 - CapのプロパティにCap Both Endsを選択します。
-
Follower並進ジョイントに、表 6のスペックと表 7にリストされたプロパティで、ボックスグラフィックを作成します。
表 6. ラベル Type Z-Axis( )XZ Plane( )FollowerJointGraphic Center(Connectivityタブでこのオプションを選択) Ground Body FollowerJoint Global Z Global X 表 7. Property 値 Length X 15 Length Y 10 Length Z 10 モデルは図 3ようになるはずです。図 3. MotionViewでのカムフォロワーの機構 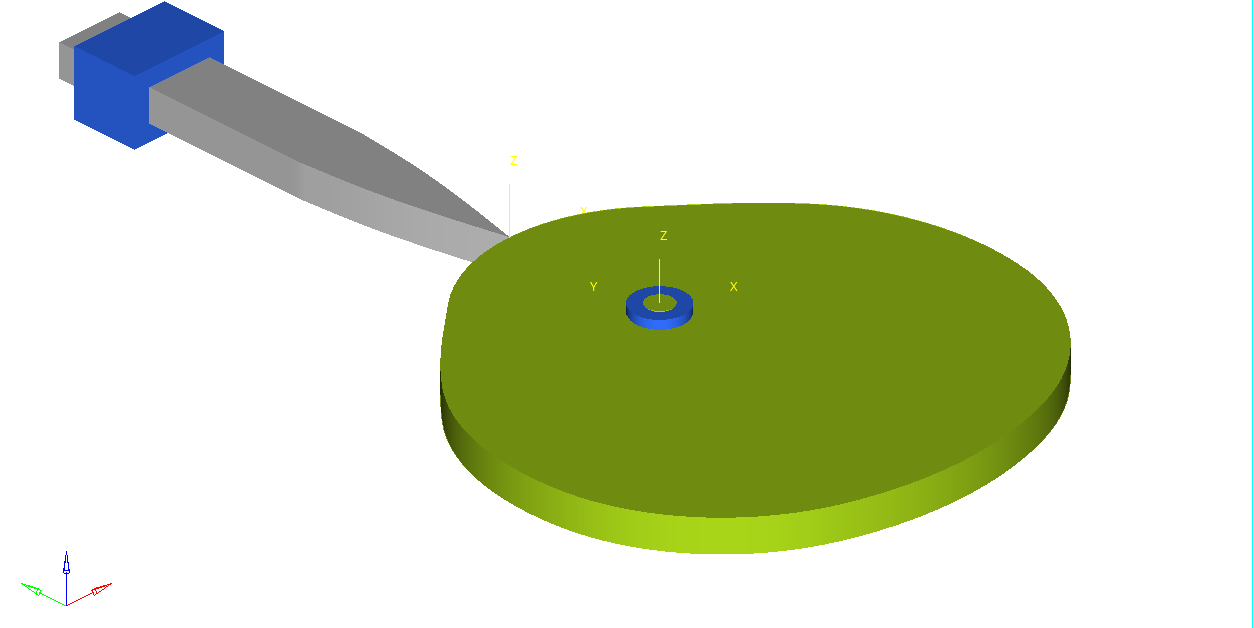
カーブの作成
このステップでは、Camの輪郭を定義するカーブを作成します。
-
以下のいずれかの方法で、Add Curveダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Curves)アイコンを右クリックします。
(Curves)アイコンを右クリックします。
- LabelにCamProfileと入力し、OKをクリックします。
- Propertiesタブで、1つ目のドロップダウンメニューを使って、カーブを2D Cartesianから3D Cartesianに変更します。
- ドロップダウンメニューをクリックし、カーブタイプをClosed curveに設定します。
- xラジオボタンをクリックします。
-
 をクリックし、CamProfile.csvを開きます。
をクリックし、CamProfile.csvを開きます。
-
図 4に示されているカーブのプロパティを選択します。
図 4. 
-
yラジオボタンをクリックします。ComponentをColumn 2に変更します。
図 5. 
-
zラジオボタンをクリックします。ComponentをColumn 3に変更します。
図 6. 
PTCVジョイントの作成
このステップでは、PTCVを作成します。
-
以下のいずれかの方法で、Add AdvJointダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Advanced Joint)アイコンを右クリックします。
(Advanced Joint)アイコンを右クリックします。
- ダイアログ内で、LabelにPTCVと入力します。
- ドロップダウンメニューからPointToCurveJointを選択し、OKをクリックします。
-
PTCVについて、Connectivityタブを設定します。
-
をダブルクリックします。ダイアログでFollowerを選択し、OKをクリックします。
-
をダブルクリックします。ダイアログでFollowerPointを選択し、OKをクリックします。
-
 をダブルクリックします。ダイアログでCamProfileを選択し、OKをクリックします。
をダブルクリックします。ダイアログでCamProfileを選択し、OKをクリックします。
-
 をダブルクリックします。ダイアログでCamMarkerを選択し、OKをクリックします。
をダブルクリックします。ダイアログでCamMarkerを選択し、OKをクリックします。
-
カムの動きの指定
このステップでは、式を使ってカムの動きを指定します。
-
以下のいずれかの方法で、Add Motion or MotionPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Motion)アイコンを右クリックします。
(Motion)アイコンを右クリックします。
- ダイアログ内で、LabelにCamMotionと入力し、OKをクリックします。
-
Connectivityタブで、
 をダブルクリックします。CamPivotを選択し、OKをクリックします。
をダブルクリックします。CamPivotを選択し、OKをクリックします。
- Propertiesタブで、ドロップダウンメニューのExpressionにより動きを定義します。
-
Expression欄に、
`10*TIME`と入力します。図 7. 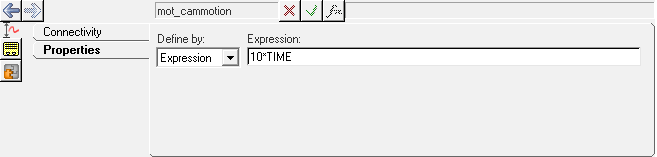
重力の指定
このステップでは、負のY方向に重力を指定します。
- Project Browserで、をクリックして拡張します。
-
Formsフォルダーで、Gravityをクリックします。パネル内で、以下の値を指定します。
- X Component = 0
- Y Component = -9810
- Z Component = 0
出力リクエストの指定
このステップでは、PTCVジョイントの反力を監視するために、出力リクエストを指定します。
-
以下のいずれかの方法で、Add Outputダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Generalツールバーで、
 (Outputs)アイコンをクリックします。
(Outputs)アイコンをクリックします。
- ダイアログで、LabelにPTCV Reactionと入力し、OKをクリックします。
- Propertiesタブで、ドロップダウンメニューのExpressionにより動きを定義します。
-
F2欄内をクリックし、
 ボタンをアクティブにします。
ボタンをアクティブにします。
-
ボタンをクリックします。
-
Expression Builderで、式を'PTCV({aj_0.idstring},0,2,0)'と入力します。
図 8. 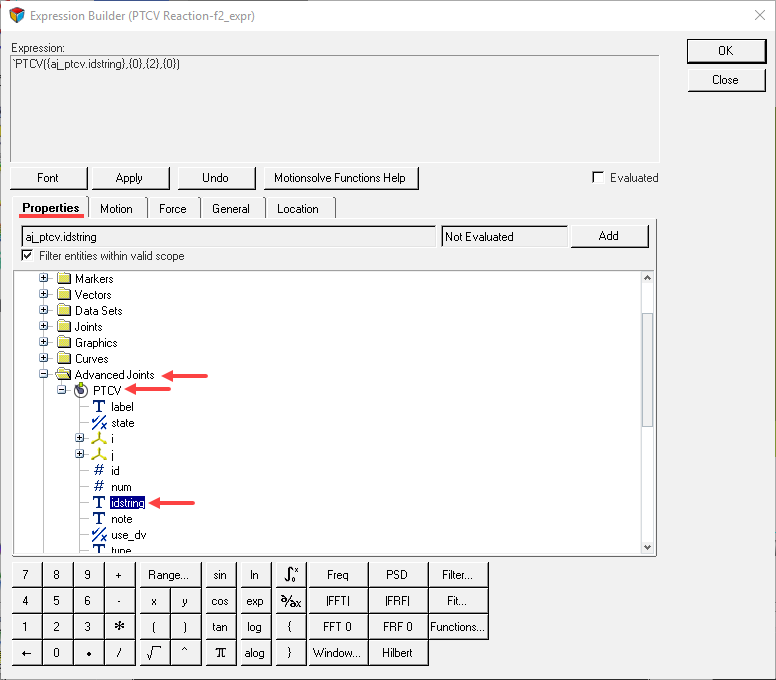
- OKをクリックします。
-
F3、F4、F6、F7、F8について、手順4から6までを繰り返します。式内の3番目のパラメータはそれぞれ3、4、6、7、8に変更します。
PTCV(id、jflag、comp、ref_marker)関数は、PTCVジョイントの反力を戻します:
- id PTCVジョイントのID
- jflag 0はIマーカー、1はJマーカーにかかる反力、
- comp 反力の成分
- ref_marker 参照マーカー(0はGlobal Frameを意味する)
モデルの実行
このステップでは、カムフォロワーモデルを実行します。
-
ツールバーで、
 (Run)をクリックします。
(Run)をクリックします。
-
Runパネルで、図 9にリストされている値を指定します。
図 9. 
- Save and run current modelラジオボタンをクリックします。
-
(ブラウザアイコン)をクリックし、ソルバーファイルの名称を指定します。
- Saveをクリックします。
-
 (Check Model)ボタンをクリックし、モデルのエラーを確認します。
(Check Model)ボタンをクリックし、モデルのエラーを確認します。
- ソルバーを起動するために、Runボタンをクリックします。
-
ソルバーが完了したら、
 (Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。
(Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。
結果の表示
このステップでは、アニメーションの確認とフォロワーのY変位をプロットする方法について学習します。
-
ソルバーがジョブを完了すると、Animateボタンがアクティブになります。Animateをクリックします。
(Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。
この機構に含まれるフォロワーの変位のプロファイルにも注目する必要があります。そのためには、フォロワーの重心のY位置をプロットします。
-
Page Controlsツールバーで、
 >
>
 をクリックします。下部右側のウィンドウをクリックしてアクティブにします。
をクリックします。下部右側のウィンドウをクリックしてアクティブにします。
-
アプリケーション選択ドロップダウンメニューを使って、クライアントをMotionView から HyperGraph 2D
 に切り替えます。
に切り替えます。
-
Curvesツールバーから
 (Build Plotsl)アイコンをクリックします。
(Build Plotsl)アイコンをクリックします。
-
(ブラウザアイコン)をクリックし、result.abfファイルを読み込みます。
-
Plotパネルを図 10に示すとおり設定します。
図 10. 
-
Applyをクリックします。これにより、フォロワーの重心のY位置をプロットします。
フォロワーのY変位のプロファイルは、図 11に示すようになっているはずです。
図 11. 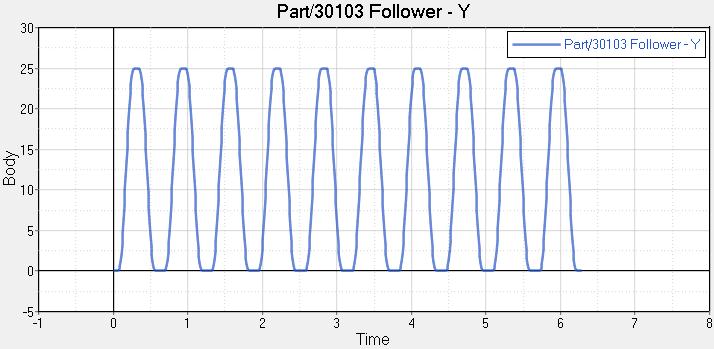 X-軸プロパティを1つのサイクルにズームインするよう設定した場合、プロファイルは図 12のようになります。
X-軸プロパティを1つのサイクルにズームインするよう設定した場合、プロファイルは図 12のようになります。図 12. 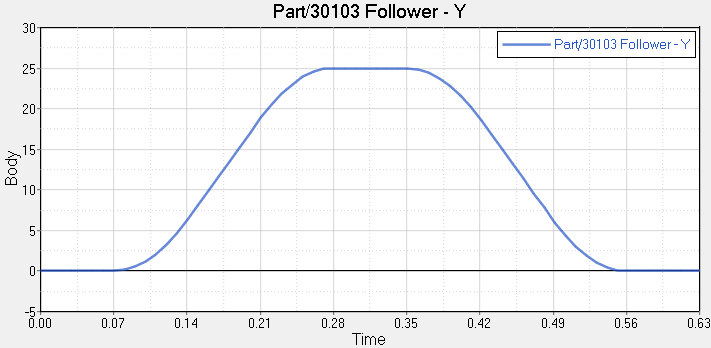
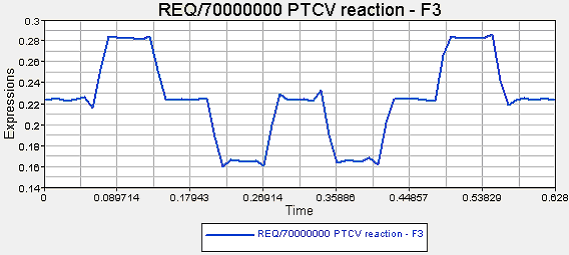
潜在的なリフトオフについてモデルをチェック
このステップでは、フォロワーのY-反力をプロットすることによって、潜在的なリフトオフについてカムフォロワーの機構をチェックします。
-
 (Add Page)をクリックし、セッションに新規ページを追加します。
(Add Page)をクリックし、セッションに新規ページを追加します。
-
クライアントをHyperGraph 2D に切り替えます。
-
(Build Plots)をクリックします。
-
(ブラウザアイコン)をクリックし、result.abfファイルを読み込みます。
-
Plotパネルを図 13に示すとおり設定します。
図 13. 
-
Applyをクリックします。
プロファイルは、図 14に示すようになるはずです。
図 14. 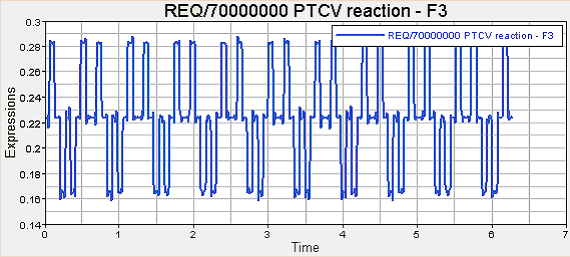
-
x軸をスケーリングして、プロファイルを1つのサイクルについて見てみます。
図 15.