Specify the Velocity of the Propellers
-
Before you can specify the velocity, you must first create the solver
variables.
-
Right-click SolverVariable
 from the toolbar to display the
Add SolverVariable dialog.
from the toolbar to display the
Add SolverVariable dialog.
-
For Variable, enter sv_Throttle_Command and
click OK.
Figure 1. 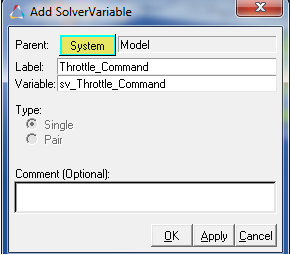
Figure 2. 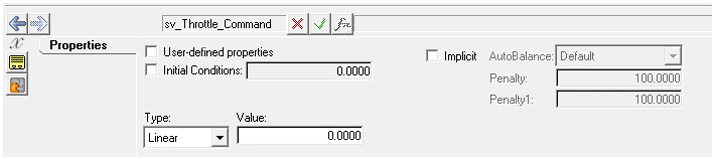
-
Right-click SolverVariable
-
Now you can update the propeller motion velocity.
-
Repeat the steps above for Propeller Right, Front and Rear, following
the table entries below:
- Motion
- Expression
- Prop_Right_Rotation
-
`VARVAL({sv_Throttle_Command.idstring})-VARVAL({sv_Roll_Command.idstring})` - Prop_Front_Rotation
-
`-VARVAL({sv_Throttle_Command.idstring}) -VARVAL({sv_Pitch_Command.idstring})` - Prop_Rear_Rotation
-
`-VARVAL({sv_Throttle_Command.idstring})+ VARVAL({sv_Pitch_Command.idstring})`
Note: The lateral propellers (left and right) control the Roll of the vehicle and the vertical propellers control the Pitch. The signal difference in the expressions determine the rotation direction of the quadrotor.Figure 3. 
-
Repeat the steps above for Propeller Right, Front and Rear, following
the table entries below: