The stress and strain for a shell element can be written in vector notation. Each
component is a stress or strain feature of the element.
The generalized strain can be written as:
Where,
Membrane strain
Bending strain or curvature
The generalized stress can be written
as:
Where,
Isotropic Linear Elastic Stress
Calculation
The stress for an isotropic linear elastic shell for each time increment is computed
using:
Where,
Young's or Elastic modulus
Poisson's ratio
Shell thickness
Isotropic Linear Elastic-Plastic
Stress Calculation
An incremental step-by-step method is usually used to resolve the nonlinear problems due to
elasto-plastic material behavior. The problem is presented by the resolution of the
following equation:
and
is the yield surface function for plasticity
for associative hardening. The equivalent stress may be expressed in form:
Where, represents stress components obtained by an elastic increment
and the elastic matrix in plane stress. The equations in Stress and Strain Calculation, Equation 7 to Equation 13 lead to obtain the nonlinear
equation:
that can be resolved by an iterative algorithm as Newton-Raphson method.
To determine the elastic-plastic state of a shell element, a number of steps have to be
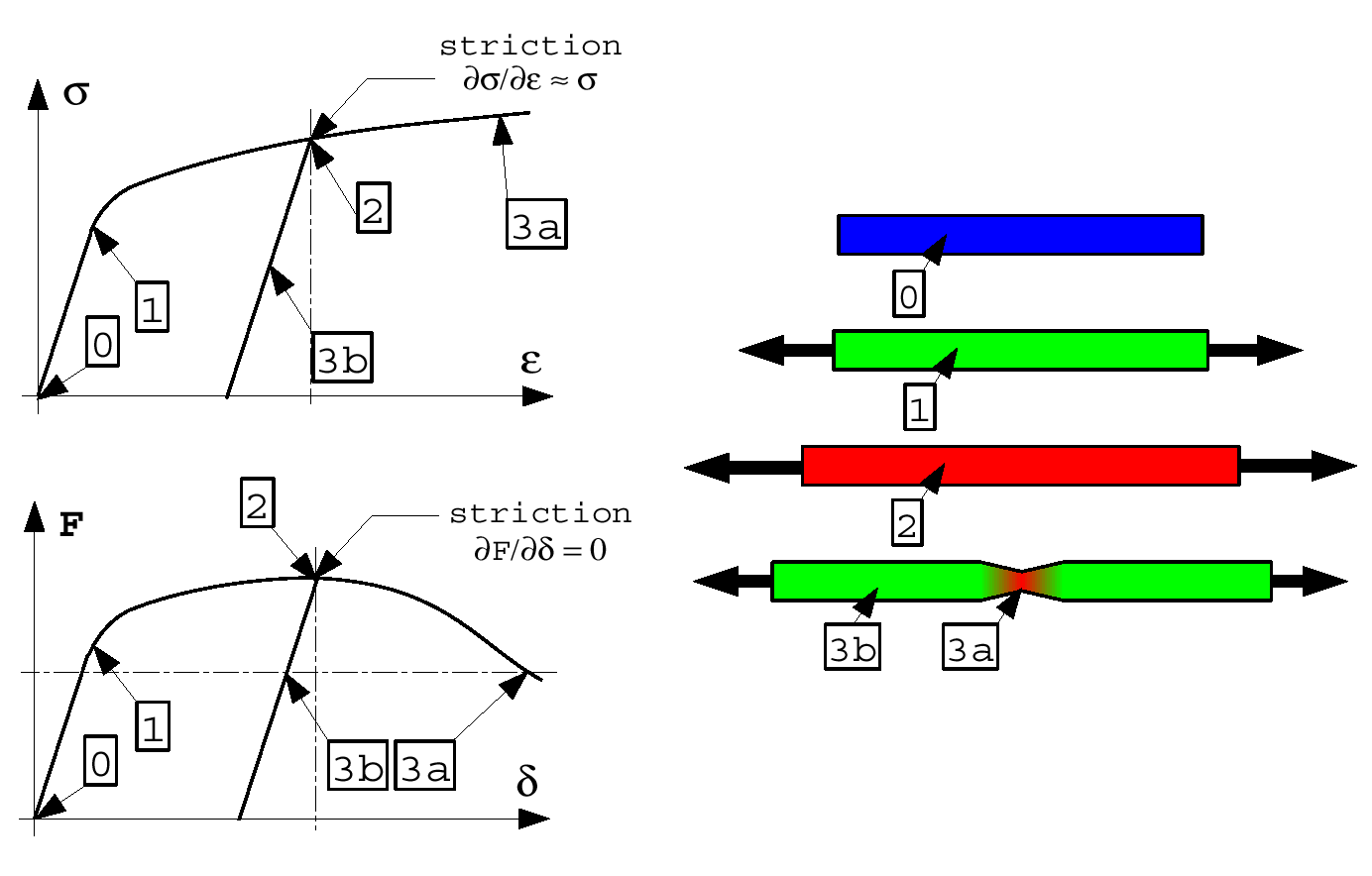
performed to check for yielding and defining a plasticity relationship. Stress-strain and
force-displacement curves for a particular ductile material are shown in Figure 1.Figure 1. Material Curve
The steps involved in the stress calculation are:
Strain calculation at integration point z
The overall strain on an element due to
both membrane and bending forces is:
Elastic stress calculation
The stress is defined as:
It is calculated using explicit time integration and the
strain rate:
The two shear stresses acting across the thickness of the
element are calculated by:
Where, is the shear factor.
Default is Reissner's value of 5/6.
von Mises yield criterion
The von Mises yield criterion for shell elements is
defined as:
For type 2 simple elastic-plastic material, the yield stress
is calculated using:
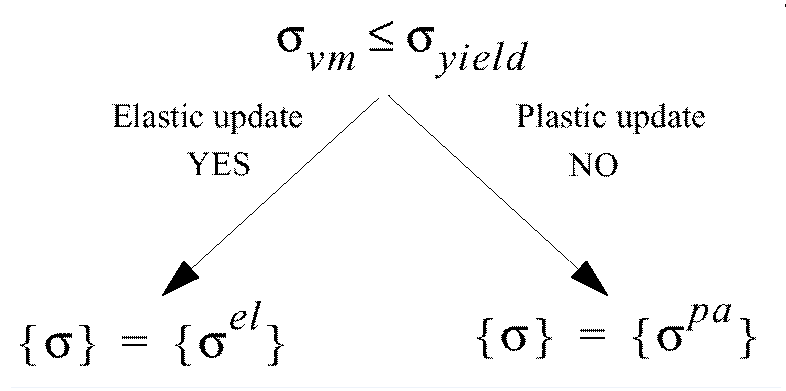
Plasticity Check
The element's state of stress must be checked to see if it has
yielded. These values are compared with the von Mises and Yield stresses calculated in
the previous step. If the von Mises stress is greater than the yield stress, then the
material will be said to be in the plastic range of the stress-strain curve.Figure 2. Plasticity Check
Compute plastically admissible stresses
If the state of stress of the element is in
the plastic region, there are two different analyses that can be used as described in
the next paragraph. The scheme used is defined in the shell property set, card 2 of
the input.
Compute thickness change
The necking of the shells undergoing large strains in
hardening phase can be taken into account by computing normal strain in an incremental process. The incompressibility
hypothesis in plasticity gives:
Where, the components of membrane strain and are computed by Equation 12
as:
The plan stress condition allows to resolve for :
Plastically Admissible
Stresses
Radial return
Iplas=2
When the shell plane stress plasticity flag is set to 0 on card 1 of the shell
property type definition, a radial return plasticity analysis is performed. Thus, Step 5
of the stress computation is:
The hardening parameter is calculated using the material stress-strain
curve:
Where, is the plastic strain rate.
The plastic strain, or hardening parameter, is found by explicit time
integration:
Finally, the plastic stress is found by the method of radial return. In case of plane
stress this method is approximated because it cannot verify simultaneously the plane
stress condition and the flow rule. The following return gives a plane stress
state:
Iterative algorithm
Iplas=1
If flag 1 is used on card 1 of the shell property type definition, an incremental
method is used. Step 5 is performed using the incremental method described by Mendelson.
1 It has been extended to plane stress situations. This
method is more computationally expensive, but provides high accuracy on stress
distribution, especially when one is interested in residual stress or elastic return.
This method is also recommended when variable thickness is being used. After some
calculations, the plastic stresses are defined as:
Where,
The value of must be computed to determine the state of plastic stress.
This is done by an iterative method. To calculate the value of , the von Mises yield criterion for the case of plane
stress is introduced: