
TransformRelativeVector
Transform relative vector in to another frame
![]()
Library
Modelica/Mechanics/MultiBody/Sensors
Description
The input vector "Real r_in[3]" is assumed to be a relative kinematic quantitybetween frame_a and frame_bthat is defined to be resolved in the frame definedwith parameter "frame_r_in". This model resolves vector r_in in thecoordinate system defined with parameter "frame_r_out" and returns thetransformed output vector as "Real r_out[3]";
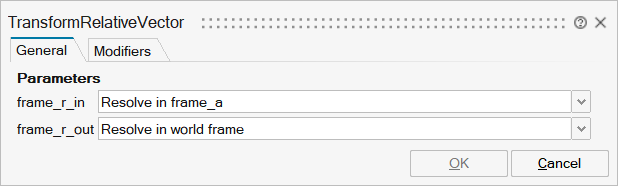
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_frame_r_in | frame_r_in | Frame in which vector r_in is resolved (world, frame_a, frame_b, or frame_resolve) | Structure | |
mo_frame_r_in/choice1 | Resolve in world frame | Number | 0 | |
mo_frame_r_in/choice2 | Resolve in frame_a | Number | 0 | |
mo_frame_r_in/choice3 | Resolve in frame_b | Number | 0 | |
mo_frame_r_in/choice4 | Resolve in frame_resolve (frame_resolve must be connected) | Number | 0 | |
mo_frame_r_out | frame_r_out | Frame in which vector r_in shall be resolved and provided as r_out (world, frame_a, frame_b, or frame_resolve) | Structure | |
mo_frame_r_out/choice1 | Resolve in world frame | Number | 0 | |
mo_frame_r_out/choice2 | Resolve in frame_a | Number | 0 | |
mo_frame_r_out/choice3 | Resolve in frame_b | Number | 0 | |
mo_frame_r_out/choice4 | Resolve in frame_resolve (frame_resolve must be connected) | Number | 0 |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo__nmodifiers | Number of Modifiers | Specifies the number of modifiers | Number | |
mo__modifiers | Modifiers | Add new modifier | Structure | |
mo__modifiers/varname | Variable name | Cell of strings | ||
mo__modifiers/attribute | Attribute | Cell of strings | 'start' | |
mo__modifiers/value | Value |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
frame_a | implicit | Coordinate system a | input | 1 |
frame_b | implicit | Coordinate system b | output | 1 |
r_in | implicit | Input vector resolved in frame defined by frame_r_in | input | 2 |
r_out | implicit | Input vector r_in resolved in frame defined by frame_r_out | output | 2 |
Port 5 | implicit | Coordinate system in which r_in or r_out is optionally resolved | output | mo_frame_r_in.choice4||mo_frame_r_out.choice4 |