
UniversalSpherical
Universal - spherical joint aggregation (1 constraint, no potential states)
![]()
Library
Modelica/Mechanics/MultiBody/Joints
Description
This component consists of a universal joint at frame_a anda spherical joint at frame_b that are connected together witha rigid rod, see default animation figure (the arrows are notpart of the default animation):

This joint aggregation has no mass and no inertia and introduces the constraintthat the distance between the origin of frame_a and the origin of frame_b is constant(= Frames.length(rRod_ia)). The universal joint is defined in the following way:
- The rotation axis of revolute joint 1 is along parameter vector n1_a which is fixed in frame_a.
- The rotation axis of revolute joint 2 is perpendicular to axis 1 and to the line connecting the universal and the spherical joint.
The definition of axis 2 of the universal joint is performed accordingto the most often occurring case for the sake of simplicity. Otherwise, the treatment is much morecomplicated and the number of operations is considerably higher,if axis 2 is not orthogonal to axis 1 and to the connecting rod.
Note, there is a singularity when axis 1 and the connecting rod are parallelto each other. Therefore, if possible n1_a should be selected in such a way that itis perpendicular to rRod_ia in the initial configuration (i.e., thedistance to the singularity is as large as possible).
An additional frame_ia is present. It is fixed in the connectingrod at the origin of frame_a. The placement of frame_ia on the rodis implicitly defined by the universal joint (frame_a and frame_ia coincidewhen the angles of the two revolute joints of the universal joint are zero)and by parameter vector rRod_ia, the position vectorfrom the origin of frame_a to the origin of frame_b, resolved in frame_ia.
The easiest way to define the parameters of this joint is by moving theMultiBody system in a reference configuration where all framesof all components are parallel to other (alternatively,at least frame_a and frame_ia of the UniversalSpherical jointshould be parallel to other when defining an instance of thiscomponent). Since frame_a and frame_ia are parallel to other,vector rRod_ia from frame_a to frame_b resolved in frame_ia can be resolvedin frame_a (or the world frame, if all frames are parallel to other).
This joint aggregation can be used in cases wherein reality a rod with spherical joints at end are present.Such a system has an additional degree of freedom to rotatethe rod along its axis. In practice this rotation is usuallyof no interest and is mathematically removed by replacing oneof the spherical joints by a universal joint. Still, in mostcases the Joints.SphericalSpherical joint aggregation can be used insteadof the UniversalSpherical jointsince the rod is animated and its mass properties are approximated bya point mass in the middle of the rod. The SphericalSpherical jointhas the advantage that it does not have a singular configuration.
In the public interface of the UniversalSpherical joint, the following(final) parameters are provided:
parameter Real rodLength(unit="m") "Length of rod";parameter Real eRod_ia[3] "Unit vector along rod, resolved in frame_ia";parameter Real e2_ia [3] "Unit vector along axis 2, resolved in frame_ia";
This allows a more convenient definition of data which is related to the rod.For example, if a box shall be connected at frame_ia directing fromthe origin of frame_a to the middle of the rod, this might be defined as:
Modelica.Mechanics.MultiBody.Joints.UniversalSpherical jointUS(rRod_ia={1.2, 1, 0.2}); Modelica.Mechanics.MultiBody.Visualizers.FixedShape shape(shapeType = "box", lengthDirection = jointUS.eRod_ia, widthDirection = jointUS.e2_ia, length = jointUS.rodLength/2, width = jointUS.rodLength/10);equation connect(jointUS.frame_ia, shape.frame_a);Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
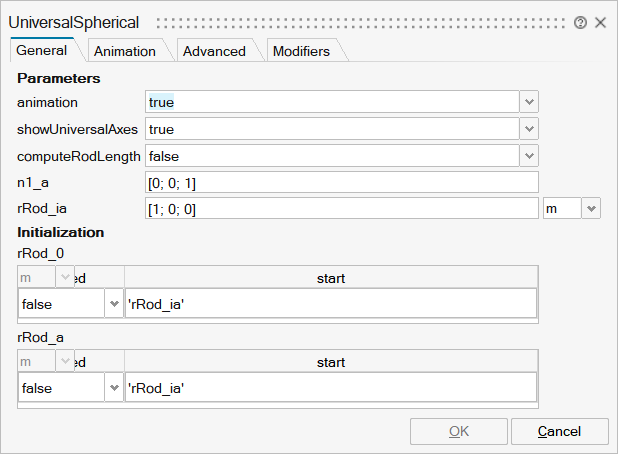
mo_animation | animation | = true, if animation shall be enabled | Scalar | true |
mo_showUniversalAxes | showUniversalAxes | = true, if universal joint shall be visualized with two cylinders, otherwise with a sphere (provided animation=true) | Scalar | true |
mo_computeRodLength | computeRodLength | = true, if distance between frame_a and frame_b shall be computed during initialization (see info) | Scalar | true |
mo_n1_a | n1_a | Axis 1 of universal joint resolved in frame_a (axis 2 is orthogonal to axis 1 and to rod) | Vector of size 3 | |
mo_rRod_ia | rRod_ia | Vector from origin of frame_a to origin of frame_b, resolved in frame_ia (if computeRodLength=true, rRod_ia is only an axis vector along the connecting rod) | Vector of size 3 | |
mo_rodLength | rodLength | Length of rod (distance between origin of frame_a and origin of frame_b) | Scalar | |
mo_eRod_ia | eRod_ia | Unit vector from origin of frame_a to origin of frame_b, resolved in frame_ia | Vector of size 3 | |
mo_e2_ia | e2_ia | Unit vector in direction of axis 2 of universal joint, resolved in frame_ia (orthogonal to n1_a and eRod_ia; note: frame_ia is parallel to frame_a when the universal joint angles are zero) | Vector of size 3 | |
mo_e3_ia | e3_ia | Unit vector perpendicular to eRod_ia and e2_ia, resolved in frame_ia | Vector of size 3 | |
mo_rRod_0 | rRod_0 | rRod_0 | Structure | |
mo_rRod_0/fixed | fixed | Cell of vectors of size 3 | true | |
mo_rRod_0/start | start | Cell of vectors of size 3 | ||
mo_rRod_a | rRod_a | rRod_a | Structure | |
mo_rRod_a/fixed | fixed | Cell of vectors of size 3 | true | |
mo_rRod_a/start | start | Cell of vectors of size 3 | ||
mo_length2_n2_a | length2_n2_a | length2_n2_a | Structure | |
mo_length2_n2_a/fixed | fixed | Cell of scalars | true | |
mo_length2_n2_a/start | start | Cell of scalars |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
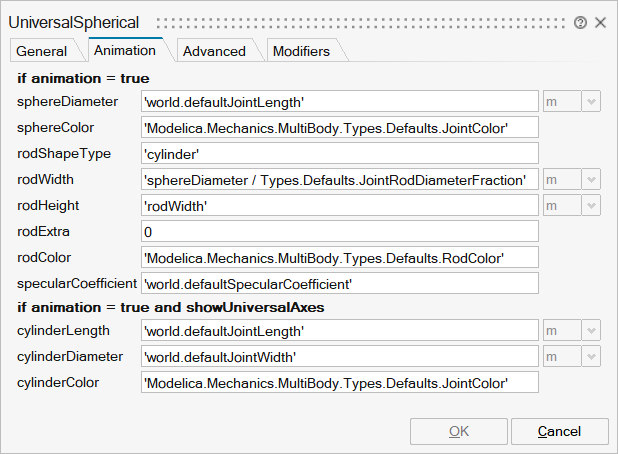
mo_sphereDiameter | sphereDiameter | Diameter of spheres representing the universal and the spherical joint | Scalar | |
mo_sphereColor | sphereColor | Color of spheres representing the universal and the spherical joint | Vector of size 3 | |
mo_rodShapeType | rodShapeType | Shape type of rod connecting the universal and the spherical joint | String | |
mo_rodWidth | rodWidth | Width of rod shape in direction of axis 2 of universal joint. | Scalar | |
mo_rodHeight | rodHeight | Height of rod shape in direction that is orthogonal to rod and to axis 2 | Scalar | |
mo_rodExtra | rodExtra | Additional parameter depending on rodShapeType | Scalar | |
mo_rodColor | rodColor | Color of rod shape connecting the universal and the spherical joints | Vector of size 3 | |
mo_specularCoefficient | specularCoefficient | Reflection of ambient light (= 0: light is completely absorbed) | Scalar | |
mo_cylinderLength | cylinderLength | Length of cylinders representing the two universal joint axes | Scalar | |
mo_cylinderDiameter | cylinderDiameter | Diameter of cylinders representing the two universal joint axes | Scalar | |
mo_cylinderColor | cylinderColor | Color of cylinders representing the two universal joint axes | Vector of size 3 |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
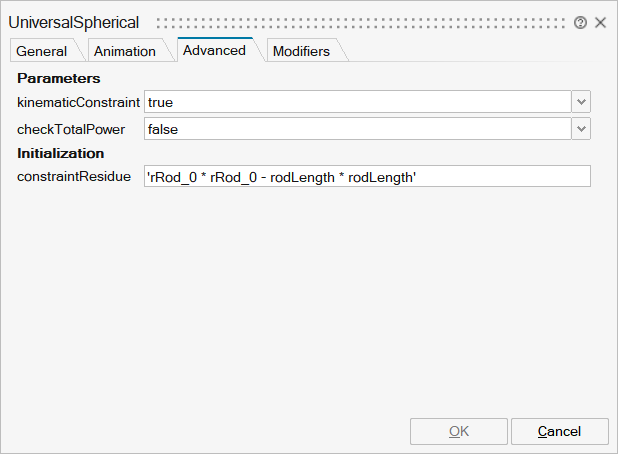
mo_kinematicConstraint | kinematicConstraint | = false, if no constraint shall be defined, due to analytically solving a kinematic loop | Scalar | true |
mo_checkTotalPower | checkTotalPower | = true, if total power flowing into this component shall be determined (must be zero) | Scalar | true |
mo_constraintResidue | constraintResidue | Constraint equation of joint in residue form: Either length constraint (= default) or equation to compute rod force (for analytic solution of loops in combination with Internal.RevoluteWithLengthConstraint/PrismaticWithLengthConstraint) | Scalar |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo__nmodifiers | Number of Modifiers | Specifies the number of modifiers | Number | |
mo__modifiers | Modifiers | Add new modifier | Structure | |
mo__modifiers/varname | Variable name | Cell of strings | 'f_rod' | |
mo__modifiers/attribute | Attribute | Cell of strings | 'start' | |
mo__modifiers/value | Value |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
frame_a | implicit | Coordinate system a fixed to the component with one cut-force and cut-torque | input | 1 |
frame_b | implicit | Coordinate system b fixed to the component with one cut-force and cut-torque | output | 1 |
frame_ia | implicit | Coordinate system at the origin of frame_a, fixed at the rod connecting the universal with the spherical joint | input | 2 |