
RollingWheel
Joint (no mass, no inertia) that describes an ideal rolling wheel (rolling on the plane z=0)
![]()
Library
Modelica/Mechanics/MultiBody/Joints
Description
A joint for a wheel rolling on the x-y plane of the world frame.The rolling contact is considered being ideal, i.e. there is noslip between the wheel and the ground. This is simplygained by two non-holonomic constraint equations on velocity leveldefined for both longitudinal and lateral direction of the wheel.There is also a holonomic constraint equation on position levelgranting a permanent contact of the wheel to the ground, i.e.the wheel can not take off.
The origin of the frame frame_a is placed in the intersectionof the wheel spin axis with the wheel middle plane and rotateswith the wheel itself. The y-axis of frame_a is identical withthe wheel spin axis, i.e. the wheel rotates about y-axis of frame_a.A wheel body collecting the mass and inertia should be connected tothis frame.
Note
To work properly, the gravity acceleration vector g of the world must point in the negative z-axis, i.e.
inner Modelica.Mechanics.MultiBody.World world(n={0,0,-1});
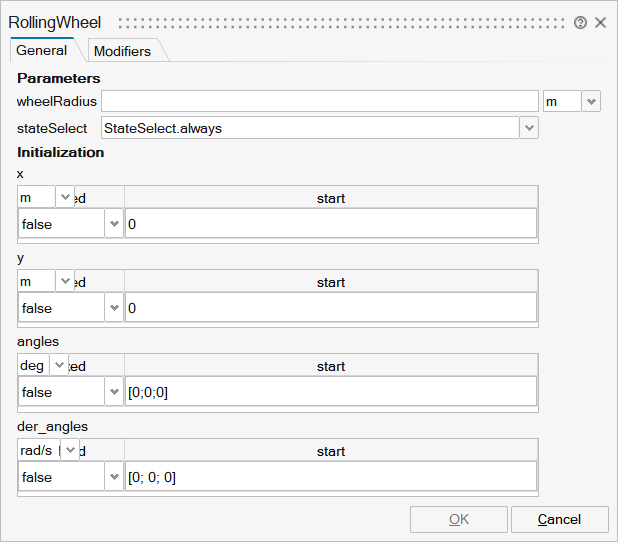
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_radius | radius | Wheel radius | Scalar | |
mo_stateSelect | stateSelect | Priority to use generalized coordinates as states | Structure | |
mo_stateSelect/choice1 | StateSelect.never | Number | 0 | |
mo_stateSelect/choice2 | StateSelect.avoid | Number | 0 | |
mo_stateSelect/choice3 | StateSelect.default | Number | 0 | |
mo_stateSelect/choice4 | StateSelect.prefer | Number | 0 | |
mo_stateSelect/choice5 | StateSelect.always | Number | 0 | |
mo_x | x | x | Structure | |
mo_x/fixed | fixed | Cell of scalars | true | |
mo_x/start | start | Cell of scalars | ||
mo_y | y | y | Structure | |
mo_y/fixed | fixed | Cell of scalars | true | |
mo_y/start | start | Cell of scalars | ||
mo_angles | angles | angles | Structure | |
mo_angles/fixed | fixed | Cell of vectors of size 3 | true | |
mo_angles/start | start | Cell of vectors of size 3 | ||
mo_der_angles | der_angles | der_angles | Structure | |
mo_der_angles/fixed | fixed | Cell of vectors of size 3 | true | |
mo_der_angles/start | start | Cell of vectors of size 3 | ||
mo_delta_0 | delta_0 | delta_0 | Structure | |
mo_delta_0/fixed | fixed | Cell of vectors of size 3 | true | |
mo_delta_0/start | start | Cell of vectors of size 3 |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo__nmodifiers | Number of Modifiers | Specifies the number of modifiers | Number | |
mo__modifiers | Modifiers | Add new modifier | Structure | |
mo__modifiers/varname | Variable name | Cell of strings | 'z' | |
mo__modifiers/attribute | Attribute | Cell of strings | 'start' | |
mo__modifiers/value | Value |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
frame_a | implicit | Frame fixed in wheel center point. x-Axis: upwards, y-axis: along wheel axis | input | 1 |