
PID
PID-controller in additive description form
![]()
Library
Modelica/Blocks/Continuous
Description
This is the text-book version of a PID-controller.For a more practically useful PID-controller, useblock LimPID.
The PID block can be initialized in differentways controlled by parameter initType. The possiblevalues of initType are defined inModelica.Blocks.Types.Init.
Based on the setting of initType, the integrator (I) and derivative (D)blocks inside the PID controller are initialized according to the following table:
| initType | I.initType | D.initType |
| NoInit | NoInit | NoInit |
| SteadyState | SteadyState | SteadyState |
| InitialState | InitialState | InitialState |
| InitialOutput and initial equation: y = y_start | NoInit | SteadyState |
In many cases, the most useful initial condition isSteadyState because initial transients are then no longerpresent. If initType = Init.SteadyState, then in somecases difficulties might occur. The reason is theequation of the integrator:
der(y) = k*u;
The steady state equation "der(x)=0" leads to the condition that the input u to theintegrator is zero. If the input u is already (directly or indirectly) definedby another initial condition, then the initialization problem is singular(has none or infinitely many solutions). This situation occurs oftenfor mechanical systems, where, e.g., u = desiredSpeed - measuredSpeed andsince speed is both a state and a derivative, it is natural toinitialize it with zero. As sketched this is, however, not possible.The solution is to not initialize u or the variable that is usedto compute u by an algebraic equation.
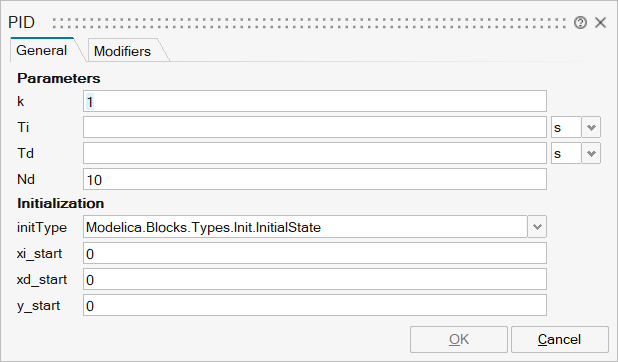
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_k | k | Gain | Scalar | |
mo_Ti | Ti | Time Constant of Integrator | Scalar | |
mo_Td | Td | Time Constant of Derivative block | Scalar | |
mo_Nd | Nd | The higher Nd, the more ideal the derivative block | Scalar | |
mo_initType | initType | Type of initialization (1: no init, 2: steady state, 3: initial state, 4: initial output) | Structure | |
mo_initType/choice1 | Modelica.Blocks.Types.Init.NoInit | Number | 0 | |
mo_initType/choice2 | Modelica.Blocks.Types.Init.SteadyState | Number | 0 | |
mo_initType/choice3 | Modelica.Blocks.Types.Init.InitialState | Number | 0 | |
mo_initType/choice4 | Modelica.Blocks.Types.Init.InitialOutput | Number | 0 | |
mo_xi_start | xi_start | Initial or guess value for integrator output (= integrator state) | Scalar | |
mo_xd_start | xd_start | Initial or guess value for state of derivative block | Scalar | |
mo_y_start | y_start | Initial value of output | Scalar |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo__nmodifiers | Number of Modifiers | Specifies the number of modifiers | Number | |
mo__modifiers | Modifiers | Add new modifier | Structure | |
mo__modifiers/varname | Variable name | Cell of strings | ||
mo__modifiers/attribute | Attribute | Cell of strings | 'start' | |
mo__modifiers/value | Value |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
u | implicit | Connector of Real input signal | input | 1 |
y | implicit | Connector of Real output signal | output | 1 |