
LimIntegrator
Integrator with limited value of the output and optional reset
![]()
Library
Modelica/Blocks/Continuous
Description
This blocks computes y as integralof the input u multiplied with the gain k. If theintegral reaches a given upper or lower limit and theinput will drive the integral outside of this bound, theintegration is halted and only restarted if the input drivesthe integral away from the bounds.
It might be difficult to initialize the integrator in steady state.This is discussed in the description of packageContinuous.
If parameter limitsAtInit = false, the limits of theintegrator are removed from the initialization problem whichleads to a much simpler equation system. After initialization has beenperformed, it is checked via an assert whether the output is in thedefined limits. For backward compatibility reasonslimitsAtInit = true. In most cases it is bestto use limitsAtInit = false.
If the reset port is enabled, then the output y is reset to setor to y_start (if the set port is not enabled), whenever the resetport has a rising edge.
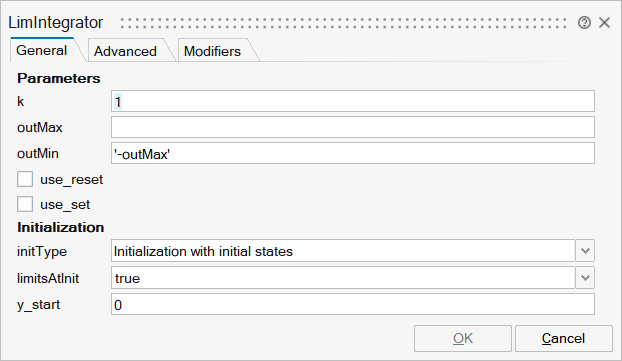
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_k | k | Integrator gain | Scalar | |
mo_outMax | outMax | Upper limit of output | Scalar | |
mo_outMin | outMin | Lower limit of output | Scalar | |
mo_use_reset | use_reset | = true, if reset port enabled | Number | 0 |
mo_use_set | use_set | = true, if set port enabled and used as reinitialization value when reset | Number | 0 |
mo_initType | initType | Type of initialization (1: no init, 2: steady state, 3/4: initial output) | Structure | |
mo_initType/choice1 | Modelica.Blocks.Types.Init.NoInit | Number | 0 | |
mo_initType/choice2 | Modelica.Blocks.Types.Init.SteadyState | Number | 0 | |
mo_initType/choice3 | Modelica.Blocks.Types.Init.InitialState | Number | 0 | |
mo_initType/choice4 | Modelica.Blocks.Types.Init.InitialOutput | Number | 0 | |
mo_limitsAtInit | limitsAtInit | = false, if limits are ignored during initialization (i.e., der(y)=k*u) | Scalar | true |
mo_y_start | y_start | Initial or guess value of output (must be in the limits outMin .. outMax) | Scalar |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
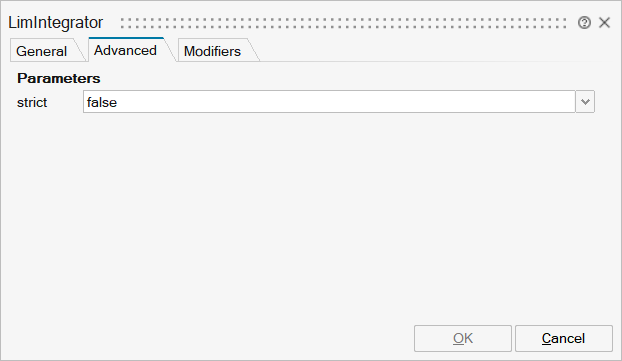
mo_strict | strict | = true, if strict limits with noEvent(..) | Scalar | true |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo__nmodifiers | Number of Modifiers | Specifies the number of modifiers | Number | |
mo__modifiers | Modifiers | Add new modifier | Structure | |
mo__modifiers/varname | Variable name | Cell of strings | ||
mo__modifiers/attribute | Attribute | Cell of strings | 'start' | |
mo__modifiers/value | Value |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
u | implicit | Connector of Real input signal | input | 1 |
y | implicit | Connector of Real output signal | output | 1 |
Port 3 | implicit | Optional connector of reset signal | input | mo_use_reset |
Port 4 | implicit | Optional connector of set signal | input | mo_use_reset&&mo_use_set |