
フォースエクスプローラ
フォースエクスプローラツールを使用して、モーション解析で荷重ベクトルとトルクベクトルを可視化します。
このツールには、モーションリボンにあるフォースエクスプローラツールをクリックしてアクセスできます。

可視化は、実行中、または結果の再生中に、ジョイント、モーター、モーション接触などのエンティティに対して適用できます。これは、ご利用のメカニズムにおける荷重の変化の仕組み、プレゼンテーション、デバッグなどの理解に有用です。
場所:モーションリボン、レビューグループ
可視化は、実行中、または結果の再生中に、ジョイント、モーター、モーション接触などのエンティティに対して適用できます。これは、ご利用のメカニズムにおける荷重の変化の仕組み、プレゼンテーション、デバッグなどの理解に有用です。
表示オプション
表示オプションを使用すると、エンティティごとの可視化を制御できます。フォースエクスプローラは、モデルブラウザで非表示になっているエンティティのベクトルは描画しません。

- 力を表示
- モーション実行中のすべての荷重を表示または非表示にします。
- トルクを表示
- モーション実行中のすべてのトルクを表示または非表示にします。
- テキストを表示
- 荷重とトルクに関連付けられている数値を表示または非表示にします。接触力で合計の力オプションを選択しないと、モーション接触は数値を表示しません。
- 常に上に表示
- 形状の上部に描いた荷重ベクトルまたはトルクベクトルを常に表示します。
- 暗黙的ジョイントを表示
- 暗黙的ジョイントに関連付けられているすべての荷重ベクトルとトルクベクトルを表示または非表示にします。

- エンティティボタンを使用して、特定のモーションエンティティに関連付けられている荷重/トルクの表示を切り替えます。ボタンの数は、モデル内にあるモーションエンティティのタイプに基づいて変化します。また、解析の実行中にも切り替えることができます。
ヒント:
- 多数のベクトルとテキストを表示すると、アニメーションの再生速度が遅くなる可能性があることに注意してください。可視化する必要のない情報は非表示に切り替えることをお勧めします。
- ジョイントのエンティティボタンは、描画するベクトル数を最小限に抑えるため、デフォルトでオフに切り替えられます。
- コントローラタイプがソフト制約のモーターまたはアクチュエータの場合、荷重ベクトル/トルクベクトルは描画されません。
- モーション結果のレビュー時に、プロットする荷重ベクトルとトルクベクトルを選択できます。
- フォースエクスプローラは、ドッキングとドッキング解除ができます。
接触力
接触力セクションでは、モーション接触力の可視化を制御できます。

- 合計の力
- このオプションは複数の荷重ベクトルを同等の荷重/トルクの組み合わせに変換します。チェックをオフにすると、数値は報告されません。
- 法線力を表示
- 接触法線力成分を表示または非表示にします。
- 接線力を表示
- 接触摩擦荷重成分を表示または非表示にします。
- 面を表示
- 法線ベクトル矢印のベースに描いた面を表示または非表示にします。
- ベクトル密度
- スライダーを使用して、接触領域に描かれるベクトル数を減らします。値1はベクトルをすべて表示します。値0はベクトルを1つ表示します。
- 出力ステップのみ表示
- モーション接触の結果は通常、接触視覚化の出力手順間に中間フレームが点在します。このオプションを使用して、中間フレームを抑制して出力手順のみを表示できます。これは、再生出力フレーム間の時間間隔を一定にする際に役立ちます。
- 接触事象に移動する
- アニメーション再生を一時停止中、最初、次、または最後の接触事象に移動できます。前または次ボタンを押すと自動リピートします。
アドバンストオプション
アドバンストオプションを使用すると、モーション接触力とトルクを調整したり、作用/反作用力を表示するかどうかを定義できます。
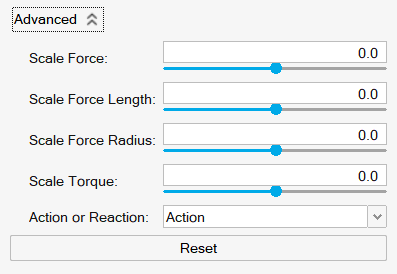
- スケール - 力
- スライダーをドラッグして、モデルに応じて力ベクトルを調整します。
- スケール - 力の長さ
- スライダーをドラッグして、力ベクトルの長さを変更します。
- スケール - 力の半径
- スライダーをドラッグして、力ベクトルの半径を変更します。
- スケール - トルク
- スライダーをドラッグして、モデルに応じてトルクベクトルを調整します。
- 作用/反作用
- 作用の力、反力、またはその両方を表示するかどうかを選択します。