
PlanetaryGearSet
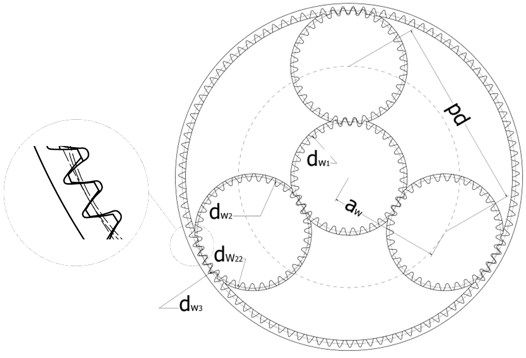
Model ElementSpecifies a planetary helical gear set. Construction of (N + 2) Helical gears, which are the sun, the ring, and N planets.
Class Name
PlanetaryGearSet
Description
The table below summarizes the attributes of the PlanetaryGearSet
classes.
| Variable | Type | Notes | Symbol |
|---|---|---|---|
| id | Int() | Unique identification number. | |
| label | Str() | Descriptor of the gear set element. | |
| rm | Reference("Marker", required=True) | The reference marker of the gear set element. This marker points to the center of sun and ring gear. Defines the orientation of the gear (z axis of the reference marker is the gear’s axial axis). | |
| rm_2 | Reference("Marker") | The reference marker of the first planet gear. This Marker needs to have the same orientation of the z-axis with the rm (axial direction), and its origin must be on the plane that is defined from the z axis of the rm (Inplane to the z axis of rm). The operating center distance is calculated from the two reference markers and is used as an input for the gear set (see comment 11). | |
| module | Double(required=True) | The normal module of the gear. | |
| number_of_planets | Int(3) | The number of planets of the gear set. Ensure that no planet interference occurs (see comment 11). | |
| num_of_teeth_1 | Int(required=True) | The number of teeth on the sun gear (see comment 12). | |
| num_of_teeth_2 | Int(required=True) | The number of teeth on gear 2 (see comment 12). | |
| num_of_teeth_3 | Int(required=True) | The number of teeth on gear 2 (see comment 12). | |
| gear_ratio | Double(required=True) | The gear ratio between the ring and sun gear (see comment 13). | |
| pressure_angle | Double(required=True) | The normal pressure angle in degrees. | |
| helix_angle | Double(required=True) | The helix angle at the pitch diameter in degrees. | |
| width_1 | Double(required=True) | The width of the sun gear. | |
| width_2 | Double(required=True) | The width of the planet gear. | |
| width_3 | Double(required=True) | The width of the ring gear. | |
| addendum_coefficient | Double(1.0) | The basic rack addendum coefficient. | |
| dedendum_coefficient | Double(1.25) | The basic rack dedendum coefficient. | |
| tool_tip_radius_coefficient | Double(0.38) | The basic rack tool tip radius coefficient. | |
| hub_diameter_1 | Double(0.0) | The inner diameter of the sun gear. | |
| hub_diameter_2 | Double(0.0) | The inner diameter of the planet gear. | |
| hub_diameter_3 | Double(0.0) | The outer diameter of the ring gear. | |
| x1 | Double(0.0) | The profile shift coefficient of the sun gear (see comment 6). | |
| x2 | Double(0.0) | The profile shift coefficient of planet gear (see comment 6). | |
| x3 | Double(0.0) | The profile shift coefficient of the ring gear. | |
| j1 | Double(0.04) | The circumferential backlash ratio of the sun gear. The range must be 0.03 – 0.05 (see comment 2). | |
| j2 | Double(0.04) | The circumferential backlash ratio of the planet gear. The range must be 0.03 – 0.05 (see comment 2). | |
| j3 | Double(0.04) | The circumferential backlash ratio of the ring gear. The range must be 0.03 – 0.05 (see comment 2). | |
| g1_connection_part | Reference(“Part", required=True) | The part that is connected to the sun gear with a fixed joint. | |
| g3_connection_part | Reference(“Part", required=True) | The part that is connected to the ring gear with a fixed joint. | |
| carrier_part | Reference(“Part", required=True) | The part that the planet gears are connected to with a revolute joint constraint. | |
| num_curve_segments | Int(10) | The number of mesh segments along the involute profile of each gear. When using a non-uniform mesh, this parameter is always an even number (the profile is split into two symmetric regions). | |
| num_width_segments | Int(20) | The number of mesh segments along the width of each gear. | |
| non_uniform_factor | Double(1.2) | Defines the factor of the mesh’s non-uniformity. The length of a triamesh element is equal to the previous element length times this factor. Use 1.0 for a uniform mesh. | |
| density | Double() | The density of the gear's material (see comment 4). | |
| contact_creation | Bool(True) | Activates an IMPACT contact between the two gears (see Contact IMPACT). | |
| contact_stiffness | Double(1e5) | Specifies the stiffness parameter of the gear's contact (see Contact IMPACT stiffness). | |
| contact_exponent | Double(2.1) | Specifies the exponent of the force deformation characteristic of the gear's contact (see Contact IMPACT exponent). | |
| contact_damping | Double(1.0) | Specifies the maximum damping coefficient that is to be used for generating a damping force on the gear's contact (see Contact IMPACT damping). | |
| contact_dmax | Double(0.1) | Specifies the penetration at which full damping is applied in the gear's contact (see see Contact IMPACT dmax). | |
| contact_coulomb_friction | Enum("ON OFF DYNAMICS_ONLY", default="OFF") | Specifies the friction force model that is used to compute the gear's contact friction force (see Contact IMPACTcoulomb_friction). | |
| contact_mu_static | Double(0.2) | Defines the coefficient of static friction in the gear's contact when the friction is in the static regime (see Contact IMPACT mu_static). | |
| contact_mu_dynamic | Double(0.1) | Defines the coefficient of the dynamic friction in the gear's contact when the friction is in the dynamic regime (see Contact IMPACT mu_dynamic). | |
| contact_stiction_transition_velocity | Double(1.0) | Defines the slip velocity at which the static coefficient of friction, mu_static, is applied (see Contact IMPACT mu_ stiction_transition_velocity). | |
| contact_friction_transition_velocity | Double(1.5) | Defines the slip velocity at which the dynamic coefficient of friction, mu_dynamic, is applied (see Contact IMPACT mu_stiction_transition_velocity). | |
| export_graphic | Bool(False) | Exports the gears' geometries to two *.stl files. These files can be re-meshed in HyperMesh. | |
| export_parameters | Bool(False) | Exports the calculated gear set and gear's parameters in a *.json file. |
g = PlanetaryGearSet (
id=1,
label='Planetary gear set',
rm=Marker(part=B_Ground),
rm_2=Marker(part=B_Ground, qp=[center_distance, 0, 0], rm=rm),
g1_connection_part=b_sun_shaft,
g3_connection_part=b_ring_shaft,
carrier_part=b_carrier_shaft,
module=2.0,
number_of_planets=3,
pressure_angle=20.0,
helix_angle=15.0,
num_of_teeth_1=35,
num_of_teeth_2=35,
num_of_teeth_3=-103,
gear_ratio=-2.943,
width_1=20.0,
width_2=20.0,
width_3=20.0,
addendum_coefficient=1.0,
dedendum_coefficient=1.25,
tool_tip_radius_coefficient=0.38,
x1=0.07,
x2=0.098,
x3=-1.4288,
j1=0.04,
j2=0.04,
j3=0.04,
hub_diameter_1=0.0,
hub_diameter_2=0.0,
hub_diameter_3=0.0,
num_width_segments=20,
num_curve_segments=10,
non_uniform_factor=1.2,
density=7.85e-06,
)