
MV-7022:フロントサスペンションスプリング - MotionSolveとOptiStructの連成シミュレーション
本チュートリアルでは、連成シミュレーションでMotionSolveとOptiStructを使用して、Short Long Arm式(SLA)サスペンションシステムのスプリングの圧縮と引張をシミュレートします。
概要
OptiStructは、静的および動的荷重を受ける線形および非線形構造の問題のための、有限要素法に基づいた構造解析ソルバーです。
MotionSolveとOptiStructの連成シミュレーションでは、マルチボディダイナミクスフレームワーク内の塑性変形や接触などの非線形有限要素問題をシミュレートできます。
MotionSolveとOptiStructの接続は、結合点を使用して行われます。結合点の結合タイプは常に球ジョイントです。つまり、並進の変位と力のみが2つのソルバー間でやり取りされます。球ジョイントを組み合わせて、回転ジョイントと固定ジョイントのコンフィギュレーションをモデル化できます。現在、その他のジョイントはサポートされていません。
現在の機能には、次のような制限事項 / 要件があります:
- 1つのMotionSolveインスタンスと共にシミュレートできるOptiStructインスタンスは1つのみです。ただし、どのインスタンスも複数の弾性体を伴うことができます。
- MotionSolveとOptiStructのシステム間で相互に作用できるのは球ジョイントのみです。
- 複数の球ジョイントをOptiStructシステムと結合した場合、これらはOptiStruct側でハードな拘束を受けることができません。つまり、これらは同じRBE2または類似したエンティティと結合できません。
- OptiStruct内のボディに直接結合されるMotionSolveボディは、数値的な不安定性を回避するため、大きな質量および慣性を持つ必要があります。逆の場合、この制約は必要ありません。
- スプリング、力、ブッシュなど、OptiStructボディに結合または適用されるコンプライアント要素は、OptiStructで定義する必要があります。例えば、MotionSolve内のボディとOptiStruct内のボディ間でブッシュが作用する場合、このブッシュはOptiStruct内の結合点とOptiStructボディ間でモデル化する必要があります。
- 全体フレームはMotionSolveとOptiStruct間で一致している必要があります。重力は同じ方向に作用し、単位が一致している必要があります。
このチュートリアルには、MotionViewおよびMotionSolveに関する中級程度の知識が必要です。
重要: MotionSolveとOptiStructの連成は、ベータ(試行)段階です。この機能には、既知または未知の問題が含まれる可能性があります。本チュートリアルは、解析におよそ5~7時間かかります。
MotionViewの準備とモデルの読み込み
注: MotionSolveとOptiStructの連成シミュレーションは試行段階と見なされます。
- SLA_MS_OS_cosim_start.mdlおよびSpring.femを自分の作業ディレクトリにコピーします。
- MotionViewの新しいセッションを開始します。
-
Standardツールバーから、Open Modelアイコン
 をクリックします。
ヒント: または、を選択することもできます。
をクリックします。
ヒント: または、を選択することもできます。 -
Open modelダイアログで、<作業ディレクトリ>にあるファイルSLA_MS_OS_cosim_start.mdlファイルを選択し、Openをクリックします。
図 1. 
モデルの変更
古いスプリングのペアを削除します。車両の左側に1つのOptiStructベースのスプリングを追加し、車両の右側に簡単な線形スプリングを追加します。
-
Project BrowserのFrnt SLA susp (1 pc. LCA)の下にあるFrnt coil springとこれに従属しているものを非アクティブにします。
-
Frnt coil springを右クリックし、を選択します。
図 2. 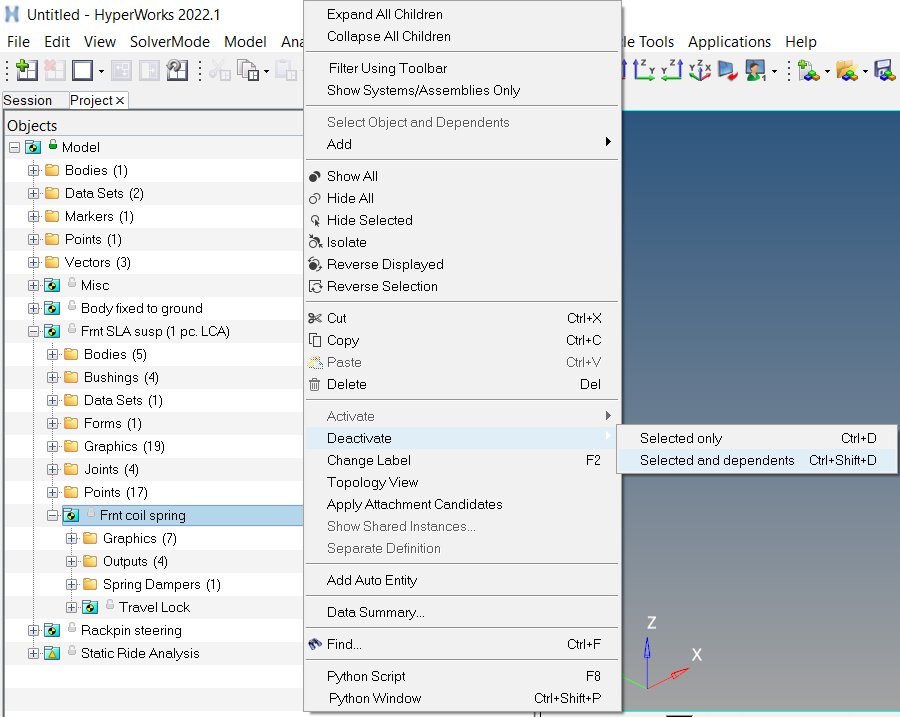
-
Frnt coil springを右クリックし、を選択します。
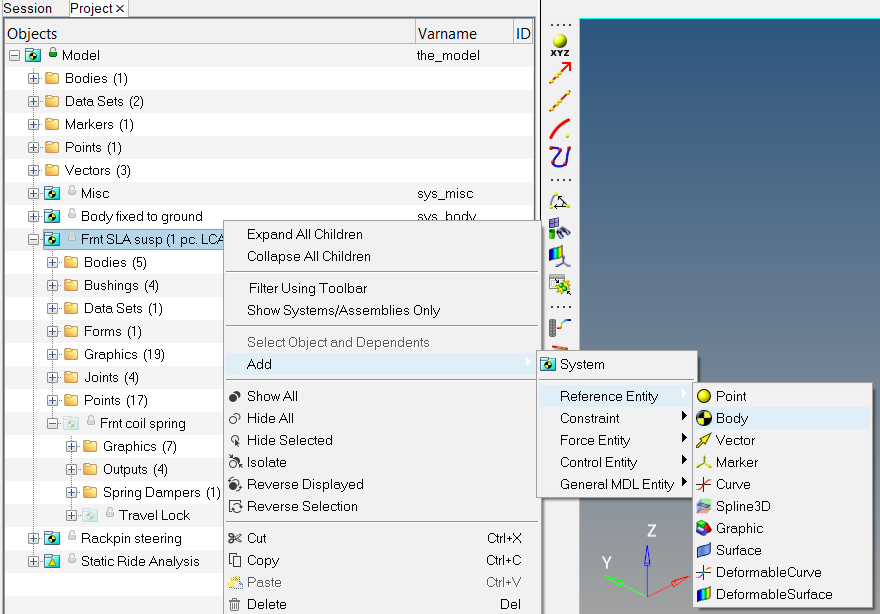
- Model Browserで、Frnt SLA susp (1 pc. LCA)を右クリックします。
-
OptiStructベースのスプリングには、SingleタイプのOS Spring-Leftというボディを作成します。
- Propertiesタブで、Flex Bodyを選択します。
- Functional sourceをOS Flexbodyに変更します。
- Input to OptiStructでUse specified FEM file and generate a new input deckが選択されていることを確認します。
- FEMファイルブラウザで、自分の作業ディレクトリからSpring.femファイルを選択します。
図 3. 
-
タイプがSingle、座標が1043.04、-388.53、1065.89のPoint 74447というポイントを作成します。
図 4. 
-
タイプがSingleで、次の結合を持つ3つのボールジョイントを作成します:
Label Body 1 Body 2 Origin Joint Spring lwr-left OS Spring-Left Lwr control arm-left Spring lwr-left Joint Spring upr-left OS Spring-Left UCA attach body-left Spring upr-left Joint at Pt 74447 OS Spring-Left UCA attach body-left Point 74447 ヒント: Body 2コレクターをダブルクリックし、Advanced selectionダイアログを表示します。Frnt SLA susp (1 pc LCA)システムから、取り付け点UCA attach body-leftを選択します。UCA attach body-leftがVehicle Bodyに解決されます。 - ボディOS Spring-Leftを選択します。
-
Propertiesタブで、Nodesをクリックします。Nodesダイアログで以下を実行します:
-
ノードID 58、57、74447が、ジョイントマーカーとして入力されます。
図 5. 
-
ノードID 58、57、74447が、ジョイントマーカーとして入力されます。
-
タイプがSingleのLinearSpringという名前のスプリングを右側に追加します。
図 6. 
- モデルをSLA_spring_MS-OS.mdlとして保存します。
連成シミュレーションの実行
-
ツールバーから、Run Solverパネルを選択します。デフォルトの設定を受諾し、Runをクリックします。
MotionViewは、SLA_spring_MS-OS_msoscosim.femという名前のOptiStructの新しいFEMファイルを作成します。MotionSolveが起動し、OptiStructの実行を待機します。
-
OptiStructの実行を開始します。
-
Runをクリックします。
連成シミュレーションが開始されます。
図 7. 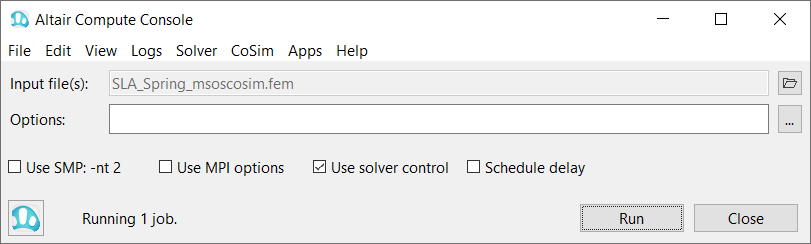
-
Runをクリックします。
-
HyperViewに結果を表示します。
- 2つのH3Dファイル、SLA_spring_MS-OS.h3dとSLA_spring_MS-OS_msoscosim.h3dを重ね合わせます。