Common area
Rotor initial position
The winding axis of the reference phase is defined from the phase shift of the first electrical harmonic of the magneto motive force (M.M.F.).
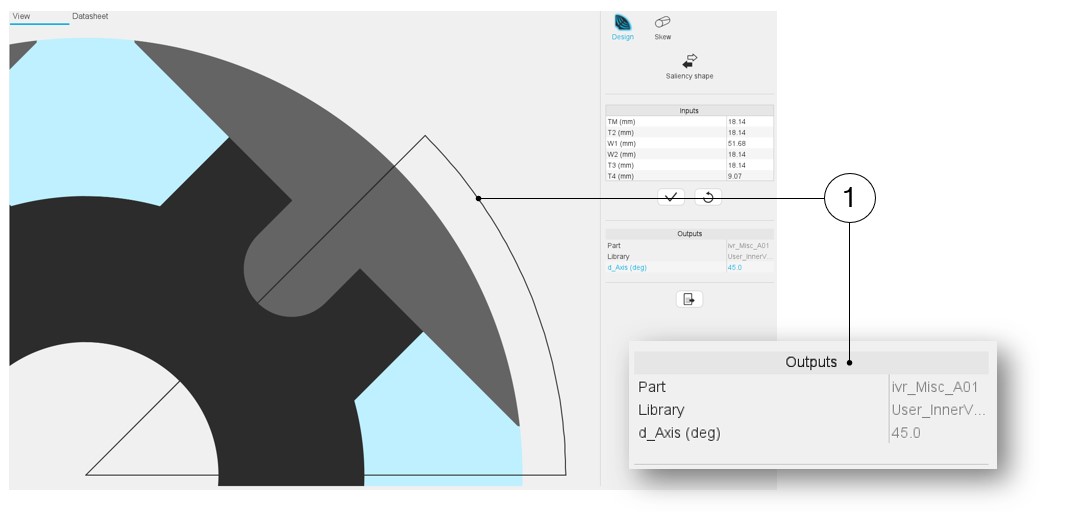
The rotor d-axis location is characterized by the saliency topology.
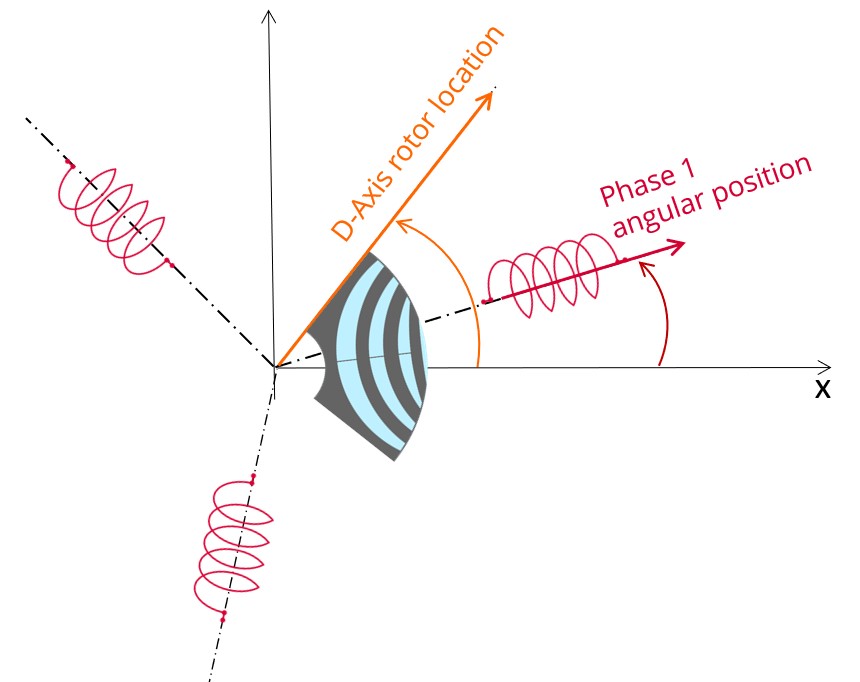
The relative angular position between the axis of the stator phase 1 (reference phase) and the rotor D-axis position must be controlled to perform the tests. See the picture below which will allow defining the working point of the machine.
Here is the representation below of the rotor and stator phase relative position.
The relative angular position between the axis of the stator phase 1 (reference phase) and the rotor D-axis position must be controlled to perform the tests.
The winding axis of the reference phase is defined from the phase shift of the first electrical harmonic of the magneto motive force (M.M.F.).
This allows us to define the working point of the machine.
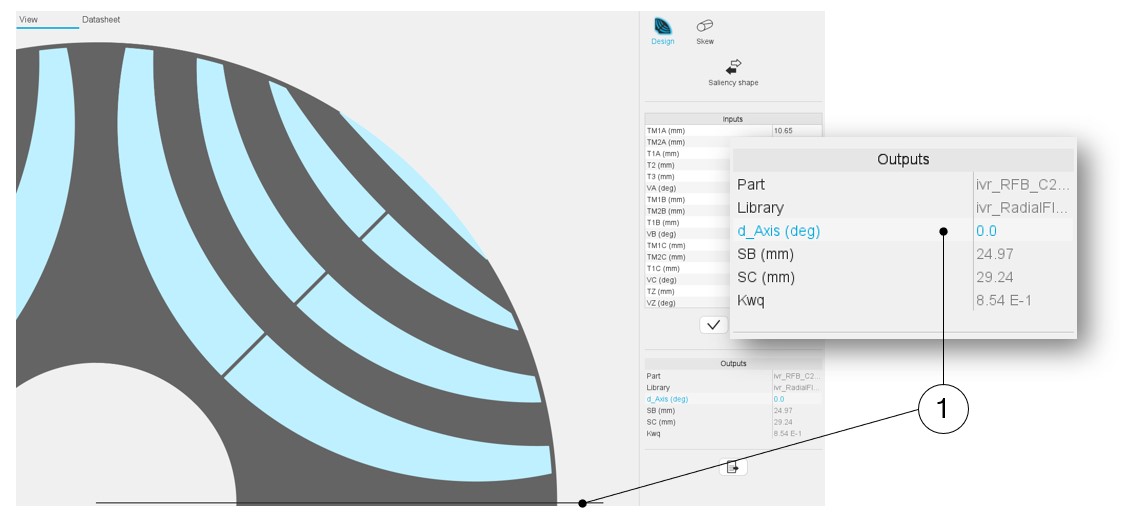
The rotor d-axis location is an output parameter (read only data) of saliency parts. It completes the description of the topology, and it is automatically used to define the relative position between the axis of the stator phase 1 (reference phase) and the rotor D-axis position for performing the tests when needed.
Mesh order
To get the results, Finite Element Modelling computations are performed.
The geometry of the machine is meshed.
Two levels of meshing can be considered: First order and second order.
This parameter influences the accuracy of results and the computation time.
By default, second order mesh is used.
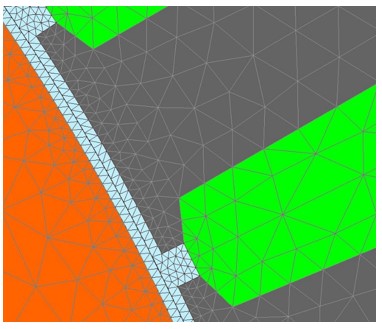
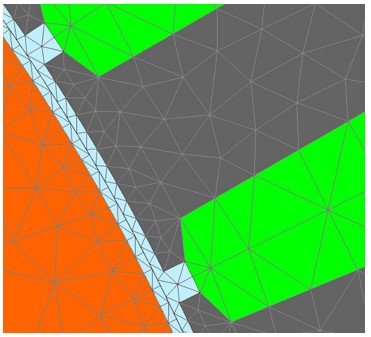
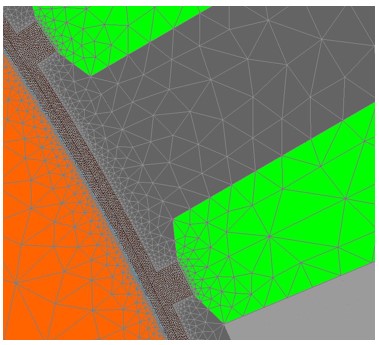
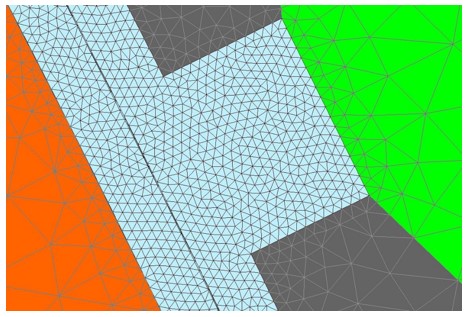
Airgap mesh coefficient
The advanced user input “Airgap mesh coefficient” is a coefficient which adjusts the size of mesh elements inside the airgap. When the value of “Airgap mesh coefficient” decreases, the mesh elements get smaller, leading to a higher mesh density inside the airgap, increasing the computation accuracy.
The imposed Mesh Point (size of mesh elements touching points of the geometry), inside the Altair Flux software, is described as:
MeshPoint = (airgap) x (airgap mesh coefficient)
Airgap mesh coefficient is set to 1.5 by default.
The variation range of values for this parameter is [0.05; 2].
The impact of the airgap mesh coefficient on resultant meshing is illustrated bellow:
Skew model – No. of layers
No. computed elec. periods
The user input “No. computed elec. periods” (Number of computed electrical periods) only required with rotor position dependency set to “Yes”) influences the computation time of the results.
The default value is equal to 0.5. The maximum allowed value is 1 according to the fact that computation is done to characterize steady state behavior based on magnetostatic finite element computation. The default value provides a good compromise between the accuracy of results and computation time.
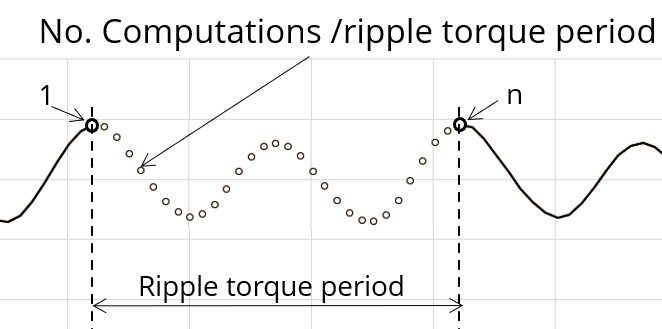
No. comp. / ripple period
The number of computations per ripple torque period is considered to perform a “Ripple torque analysis”.
The user input “No. comp. / ripple period” (Number of computations per ripple torque period) influences the accuracy of results (computation of the peak-peak ripple torque) and the computation time.
The default value is equal to 30. The minimum allowed value is 25. The default value provides a good compromise between the accuracy of results and computation time.
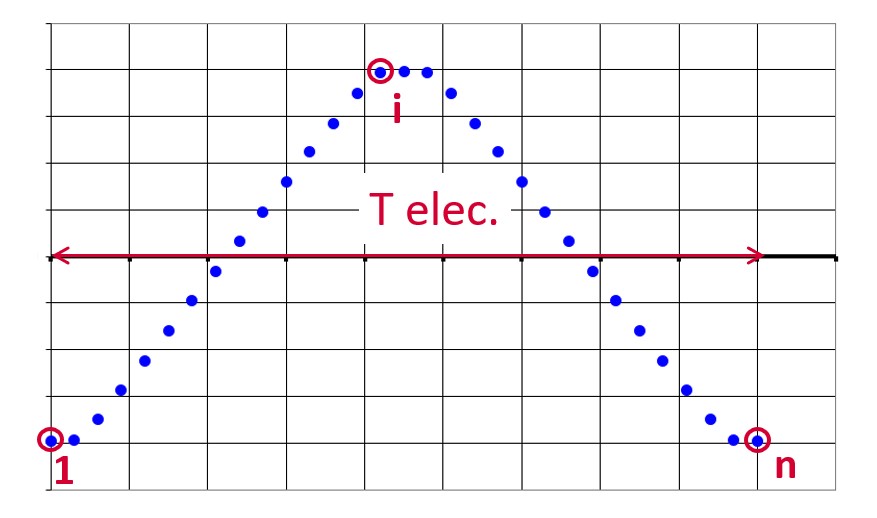
No. comp. / elec. period
In general, the user input “No. comp. / elec. period” (Number of computed electrical periods) only required with rotor position dependency set to “Yes” influences the accuracy of results (computation of the peak-peak ripple torque, iron losses…) and the computation time.
Current definition mode
There are 2 common ways to define the electrical current.
Electrical current can be defined by the current density in electric conductors.
In this case, the current definition mode should be « Density ».
Electrical current can be defined directly by indicating the value of the line current (the RMS value is required).
In this case, the current definition mode should be « Current ».
Line current h1, rms
When the choice of current definition mode is “Current”, the rms value of the line current supplied to the machine: “Line current, h1 rms” (Line current, first harmonic rms value) must be provided.
Current density h1, rms
Max. line current, h1 rms
Max. current dens. h1, rms
Max. Line-Line voltage, h1 rms
No. comp. for Jd,Jq
To get maps in the Jd-Jq plan, a grid is defined. The number of computation points along the d-axis and q-axis can be defined with the user input « No. comp. for current Jd, Jq » (Number of computations per quadrant for D-axis and Q-axis phase currents).
The default value is equal to 5. This default value provides a good compromise between the accuracy of results and computation time. The minimum allowed value is 5.
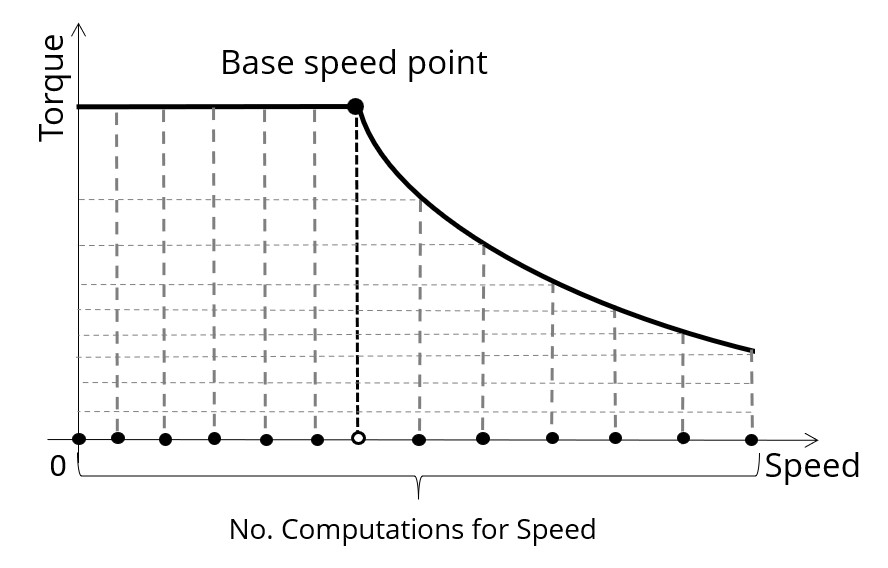
No. comp. for speed
The “No. comp. for speed” (Number of computations for speed) corresponds to the number of points to be considered in the speed range from 0 to the maximum speed.
Half of these points are distributed from 0 to the base speed. The remaining points are distributed from the base speed to the maximum speed.
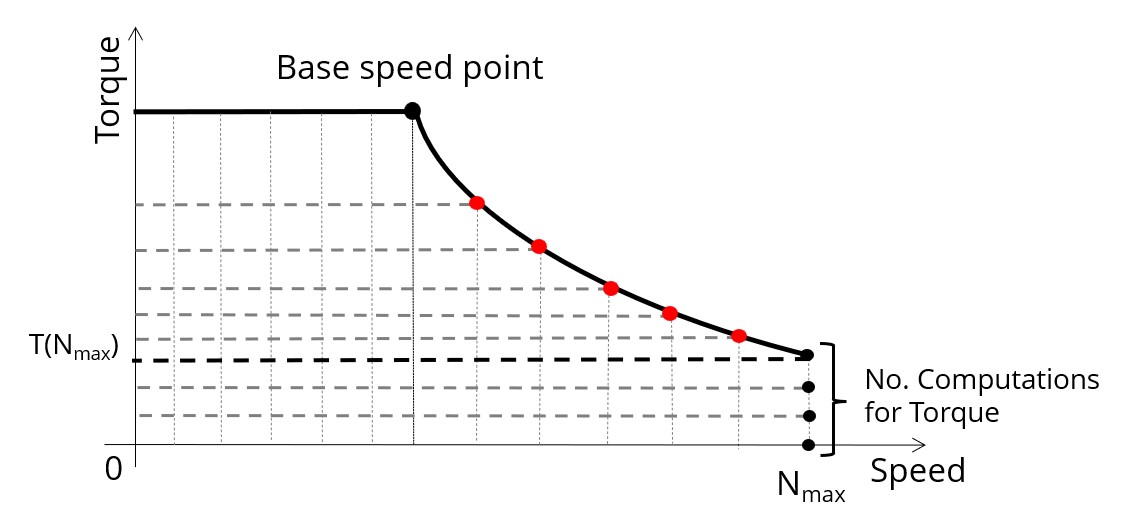
No. comp. for torque
For the speed range [Nbase; Nmax.], the number of computations for torque is imposed by the number of computations for speed in the speed range [Nbase; Nmax.] (Red points in the image shown below).
The advanced user input parameter “No. comp. for torque” allows to finalize the grid within the torque range [0, T (Nmax.)] at the maximum speed (Black points in the image shown below).
The default value is equal to 7. The minimum allowed value is 3. The maximum recommended value is 20.
Max. engine order
Two kinds of inputs are possible: either set an engine order or a number of points per electrical period. Define the Max. engine order (Maximum engine order) or the No. points / elec. period (Number of points per electric period).
When decomposing the Maxwell pressure, applied on the stator, to get its harmonic contributions, the “max. engine order” (Maximum engine order) is required to compute its decomposition in function of the time.
"Engine order" refers to a mechanical revolution period of the motor whereas frequency refers to the considered electrical period.
Obviously, both are linked with speed.
For instance, radiated sound power can be displayed either by considering frequency or engine order.
No. points / elec. period
The second possibility is to set a “No. points / elec. Period” meaning a number of points per electrical period.
For transient computations the minimum needed number of points per electrical period is 40.
So, when the engine order is not high enough to reach this constraint, It is automatically modified to get 40 computation points per electrical period.
Max. mode / spatial order
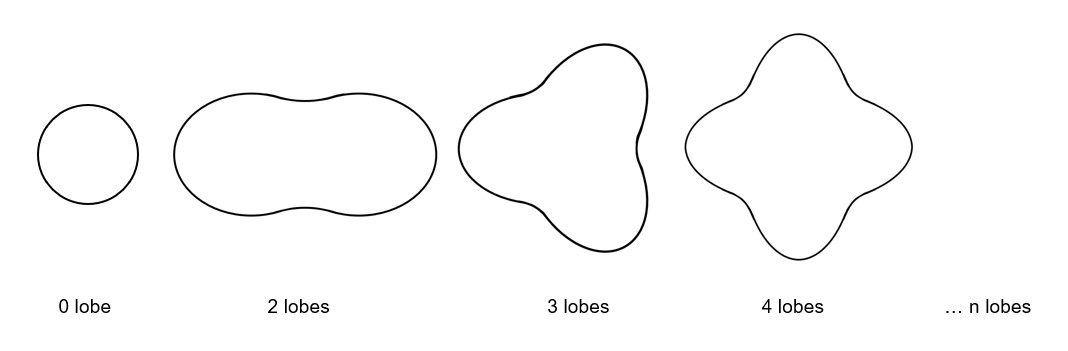
The “max. mode / spatial order” (Maximum mode / spatial order) input allows the user to define the number of modes to be considered for the acoustic structural analysis. If the user selects 25, it means that the highest number of lobes in the stator deformation will be equal to 25 lobes. All deformations corresponding to more than 25 lobes will be dismissed.
No. points / tooth pitch
The “No. comp. / tooth pitch” (Number of computations per tooth pitch) allows to choose the number of Maxwell pressure evaluations per tooth. The more points selected, the more accurate the Maxwell pressure harmonic decomposition will be.
Advice for use
The modal analysis as well as the radiation efficiency are based on an analytical computation where the stator of the machine is considered as a vibrating cylinder.
The considered cylinder behavior is weighted by the additional masses like the fins or the winding and the subtractive masses like the slots and the cooling circuit holes.
This assumption allows to get fast evaluation of the behavior of machine in connection to NVH. In no way this can replace a mechanical Finite Element modeling and simulation.
- The limits of the analytical model are reached or overpassed
- Unusual topology and/or dimensions of the teeth/slots
- Complexity of the stator-frame structure when it is composed with several components for instance
- The ratio between the total length of the frame Lframe and the stack length
of the machine Lstk in any case, this ratio must be lower than 1.5: