
Block Category: Extensions > ROS
•A: Alpha values of pixels; double
•angular[x,y,z]: Angular acceleration in x y and z direction; 3x1 matrix double
•B: Blue color intensity; double
•Byte[data]: Array of data matrix
•char data: Character data
•com[x,y,z]: Center of mass; 3x1 matrix double
•covariance[36]: Row-major representation of the 6x6 covariance matrix; 36x1 matrix double
•Empty data: Empty data
•Floatx [data]: Multidimensional array
•force[x,y,z]: Force in x, y, and z direction; 3x1 matrix double
•frame_id: Frame associated with the data; string
•G: Green color pixel value; double
•intx [data]: Multidimensional array
•ixx: The moment of inertia of a body along the horizontal axis passing throgh the centroid of the body; double
•iyx: The moment of inertia of a body along the vertical axis passing through the centroid of the body; double
•izz: The moment of inertia of a body along the axis perpendicular to both the horizontal and vertical axes through the centroid of the body; double
•[label]: Label of given dimension; string
•linear[x,y,z]: Linear acceleration in x, y, and z direction; 3x1 matrix double
•M: Mass in kilograms; double
•offset: Padding values preceding data; unsigned integer
•position[x,y,z]: Position in free space in x, y, and z coordinates; 3x1 matrix double
•quaternion[x,y,z,w]: Orientation in free space in quaternion form; 4x1 matrix double
•R: Red color pixel value; double
•Rotation[x,y,z,w]: Orientation in free space in quaternion form; 4x1 matrix double
•seq: Consecutively increasing ID; integer
•[size]: Size of given dimension; unsigned integer
•[stride]: Stride of given dimension; unsigned integer
•string data: String data
•theta: Rotation angle in radiance; double
•time: Current ROS server time; double
•timestamp: Time at which the data is received; double
•torque[x,y,z]: 3x1 matrix double
•translation[x,y,z]: Vector in free space in x y and z direction; 3x1 matrix double
•UIntx [data]: Multidimensional array
•[x]: Position of array in x direction that can support up to 32 inputs of data; matrix
•X: Position in X direction; double
•[y]: Position of array in y direction that can support up to 32 inputs of data; matrix
•Y: Position in Y direction; double
•[z]: Position of array in z direction that can support up to 32 inputs of data; matrix
•Z: Position in Z direction; double
Description: The ROS Publisher block allows communication with ROS-enabled robots. ROS Publisher publishes a specific type of ROS message over a given ROS topic. The message is updated, if necessary, at each time step. Interested ROS Subscriber blocks can access the messages. Messages are exchanged until the simulation terminates.
Communication protocol: Indicates UDP or Websocket communication protocol. UDP is faster, but works only with ROS 1.
Publisher Client ID: Indicates the ID required to differentiate between different instances of the publisher.
Port: Indicates a dedicated port number set by the ROS bridge server.
ROS Message Type: Defines the type of message and the data format. The ROS Message Type determines the inputs on the ROS Publisher block. For example, geometry_msgs/Pose is a representation of pose in free space, composed of position and quaternion (orientation), which are the inputs to the block.
ROS Publisher recognizes two types of messages: geometry and standard. Message types are described at https://index.ros.org/p/geometry_msgs/ and https://index.ros.org/p/std_msgs/ .
ROS Server IP: Indicates the ROS bridge server name or IP address. If you do not have a ROS bridge server, you can install one on Windows Subsystem for Linux (WSL) on Windows 10+. If you do, to access the IP address, open a Linux shell by entering WSL in the Search box in the lower left corner of your screen and enter ifconfig | grep -o 'inet [0-9.]\+'
Use the first inet address from the displayed list.
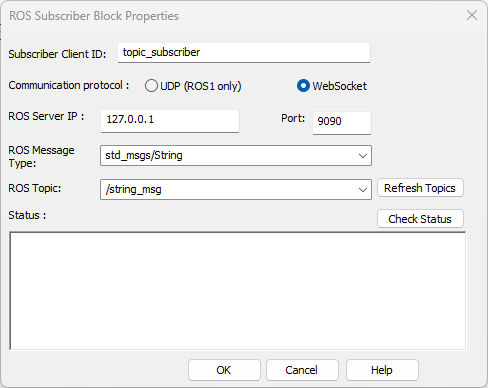
ROS Topic: Lists the available ROS topics. Click Refresh Topics to refresh the list.
Status: Displays the connectivity to the ROS server. Click Check Status to see the current connectivity.
See Examples > Blocks > Extensions > ROS.