MV-1010: 3D Mesh to Mesh Contact Simulation
This tutorial will guide you through the new 3-D rigid body contact capabilities in MotionSolve version 14.0 and later.
- Import CAD geometry with graphic settings suitable for contact simulation.
- Setup 3D rigid body contact between meshed geometries in the multi-body model.
- Perform a transient analysis to calculate the contact forces between these geometries.
- Post-process the results using a report generated automatically.
For these purposes, you will make use of a slotted link model.
This tutorial will use the mesh-to-mesh contact approach. This makes use of surface meshes for the bodies coming in contact during the simulation. A surface mesh is defined as an interconnected set of triangles that accurately represent the surface of a 3D rigid body. MotionSolve prescribes certain conditions for such a surface mesh.- Each component mesh should form a closed volume. This means that the given mesh should not contain any open edges (edge which is part of only one element) or T- connections (2 elements join at the common edge in form of a T).
- Mesh should be of uniform size.
- Element surface normal should point in the direction of expected contact.
You can learn more about the best practices for contact modeling by clicking here. For such a meshed representation of 3D rigid bodies, MotionSolve uses a numerical collision engine that detects penetration between two or more surface meshes and subsequently calculates the penetration depth(s) and the contact force(s).There are numerous 3D contact applications (gears, cams, mechanisms with parts in contact etc.) that may be solved using this approach.
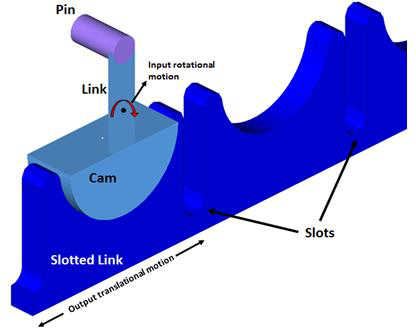
- Slotted Link Model
- A slotted link mechanism (sometimes also referred to as a scotch-yoke
mechanism) is a type of mechanism used to convert an input rotational motion
into continuous or intermittent translational motion of a sliding link or
yoke part. The motion is transferred via a contact force between parts of
the mechanism that are in contact. Both normal and friction contact force
may be responsible for the transfer of motion. Such mechanisms find common
application in valve actuators, air compressors, certain reciprocating and
rotary engines among others.
Figure 1.