Script an Open Loop Acceleration Event
In this step, you will script an event with 50% throttle, 0% brake and 0 steering angle.
An event can be broken down into smaller sub-events or maneuvers. You will model this as a single maneuver event.
-
Open any text editor and copy and paste the following text into it.
Important: All blank lines must be removed prior to saving the file.Tip: Read through the comments for a better understanding of what is written in the ADF.
$-----------------------------------------------------------------ALTAIR_HEADER $ This block is required for version control [ALTAIR_HEADER] FILE_TYPE = 'ADF' FILE_VERSION = 1.0 FILE_FORMAT = 'ASCII' $--------------------------------------------------------------------------UNITS $In this block we specify the units in which this file should be read [UNITS] (BASE) {length force angle mass time} 'meter' 'newton' 'radians' 'kg' 'sec' $--------------------------------------------------------------------VEHICLE_IC $In this block we specify the initial conditions specifically initial speed of the $vehicle with respect to the vehicle IC marker in the driver attachments [VEHICLE_INITIAL_CONDITIONS] VX0 = -20.0 VY0 = 0.0 VZ0 = 0.0 $--------------------------------------------------------------STEERING_STANDARD $This block specifies the saturation and cutoff frequency for the low pass filter for $steering output signal. These signals are global and are active for the entire event [STEER_STANDARD] MAX_VALUE = 3.141593 MIN_VALUE = -3.141593 SMOOTHING_FREQUENCY = 10.0 INITIAL_VALUE = 0.0 $--------------------------------------------------------------THROTTLE_STANDARD $This block specifies the saturation and cutoff frequency for the low pass filter for $throttle output signal [THROTTLE_STANDARD] MAX_VALUE = 1.0 MIN_VALUE = 0.00 SMOOTHING_FREQUENCY = 10.0 INITIAL_VALUE = 0.5 $---------------------------------------------------------------BRAKING_STANDARD $This block specifies the saturation and cutoff frequency for the low pass filter for $brake output signal [BRAKE_STANDARD] MAX_VALUE = 1.0 MIN_VALUE = 0.0 SMOOTHING_FREQUENCY = 10.0 INITIAL_VALUE = 0.0 $-----------------------------------------------------------------MANEUVERS_LIST $This block provides the list of all the maneuvers, simulation time for each maneuver $maximum solver step size (hmax) and print interval [MANEUVERS_LIST] { name simulation_time h_max print_interval} 'MANEUVER_1' 5.0 0.01 0.01 $---------------------------------------------------------------------MANEUVER_1 [MANEUVER_1] $This block provides the ties controllers to each driver output TASK = 'STANDARD' (CONTROLLERS) {DRIVER_SIGNAL PRIMARY_CONTROLLER ADDITIONAL_CONTROLLER} STEER OL_STEER_0 NONE THROTTLE OL_0.5 NONE BRAKE OL_0 NONE $---------------------------------------------------------OL_STEER $This is controller block containing all the information required by $the driver to construct the controller. Different controllers have $different requirements. Here we are using open loop constant type $of controller. [OL_STEER_0] TAG = 'OPENLOOP' TYPE = 'CONSTANT' VALUE = 0.0 $---------------------------------------------------------OL_BRAKE [OL_0] TAG = 'OPENLOOP' TYPE = 'CONSTANT' VALUE = 0.0 $---------------------------------------------------------OL_THROTTLE [OL_0.5] TAG = 'OPENLOOP' TYPE = 'CONSTANT' VALUE = 0.5 - Save the file.
-
Source the file in the Altair Driver File
browser.
Figure 2. 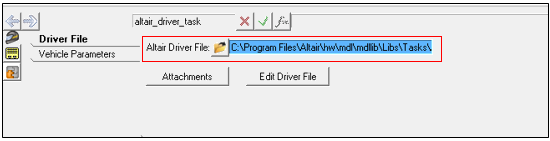 Note: The Edit driver file button can be used to edit the file.
Note: The Edit driver file button can be used to edit the file. -
Click
 to run the simulation.
to run the simulation.
-
After the simulation is over and the solver creates the h3d and plt files, from
the menu bar, click .
Figure 3. 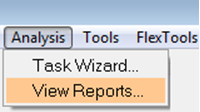
-
Select the recent run in the View Reports dialog and click
OK.
Figure 4. 
-
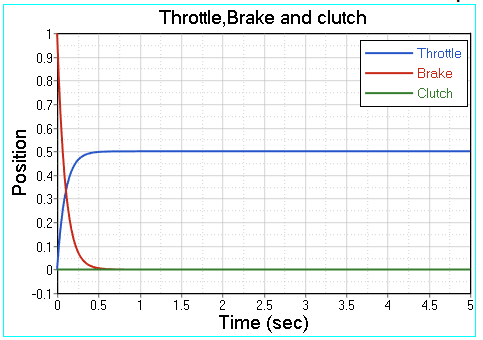
The noise in the steering is numerical error of negligible magnitude – 0 for
all practical purposes. Throttle is constant at 0.5 (driver throttle, brake and
clutch outputs are normalized so, 50%) and brake is constant at 0.
Figure 5. 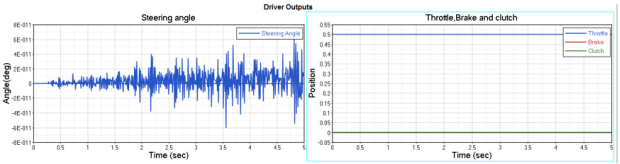
- Next we will try slightly different initial conditions. We will start the throttle at 0 and brake at 100%. Click the Edit Driver File button to open up the file editor.
-
Change the INITIAL_VALUE attribute in the THROTTLE_STANDARD block in the ADF,
from 0.5 to 0.
[THROTTLE_STANDARD] MAX_VALUE = 1.0 MIN_VALUE = 0.00 SMOOTHING_FREQUENCY = 10.0 INITIAL_VALUE = 0.5 0 -
Similarly, change the INITIAL_VALUE attribute in the BRAKE_STANDARD block in
the ADF, from 0.0 to 1.0.
[BRAKE_STANDARD] MAX_VALUE = 1.0 MIN_VALUE = 0.0 SMOOTHING_FREQUENCY = 10.0 INITIAL_VALUE = 0.0 1.0 - Save the ADF.
- Run the simulation and study the results.
-
Now, we see that throttle and brake start from respective initial values and
step up to the controller outputs. The time taken to step up is roughly
(5x1/SMOOTHING_FREQUENCY).
Figure 6.