Allows the simulation of unconstrained structures. Typical
applications are an airplane in flight, suspension parts of
a car, or a satellite in space.
With inertia relief, the applied loads are balanced by a set of translational and rotational accelerations. These accelerations provide body forces, distributed over the structure in such a way that the sum total of the applied forces on the structure is zero. This provides the steady-state stress and deformed shape in the structure as if it were freely accelerating due to the applied loads. Boundary conditions are applied only to restrain rigid body motion. Because the external loads are balanced by the accelerations, the reaction forces corresponding to these boundary conditions are zero.
This calculation is automated.
Inertia relief boundary conditions may be defined in the Bulk Data section of the input deck or
they may be determined automatically by the
solver.
Use SUPORT Entries
PARAM,INREL,-1 is used to activate
inertia relief.
The SUPORT and SUPORT1 Bulk Data Entries are used to
define up to six reaction degrees of freedom of
the free body.
SUPORT entries will be used in all relevant subcases and therefore do not
need to be referenced in the Subcase Information
section.
SUPORT1 entries need to be referenced by a SUPORT1 data
selector statement for use within a subcase.
Automatic Support Generation
Up to six rigid body modes:
Inertia relief boundary conditions may be
generated automatically by using
PARAM,INREL,-2.
Greater than six rigid body modes:
Inertia relief boundary conditions may be
generated automatically by using
PARAM,INREL,-2.
The METHOD parameter on
PARAM,INREL
can reference the ID of
EIGRL or
EIGRA entry.
Eigenvalue subcases are internally generated
to calculate the rigid body modes, inertial loads,
and support points.
In OptiStruct,
inertia relief can be applied to linear static, nonlinear static analyses, and modal
frequency response analyses. For nonlinear static analysis with contact, by default,
only freeze contact is supported with inertia relief. If non-freeze contact is
present, PARAM,IR4NLCON,YES can be used to allow the model to run
with inertia relief. A static subcase with inertia relief is not supported by
default in a linear buckling analysis. PARAM,INRELBCK,1 or
PARAM,INRELBCK,2 can be used to attempt Buckling Analysis
based on Inertia relief. Inertia relief is meaningless in normal modes analysis.
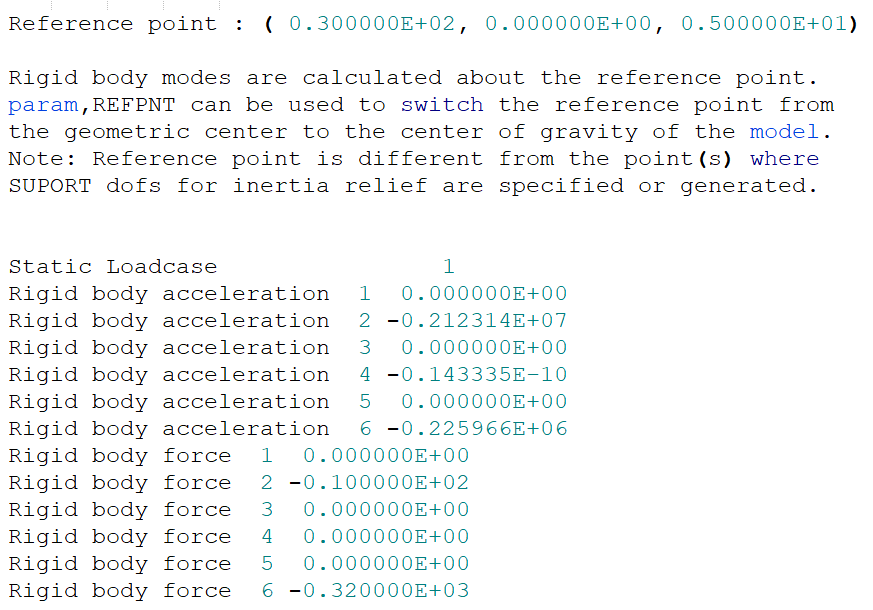
PARAM,PRINFACC,1 can be used to print
additional information such as the output of
inertial relief rigid body forces and
accelerations in the .out
file.
These rigid body forces and accelerations are
intermediate results from the inertia relief
solution. The reference point printed in the
.out file is not the point of
support location for inertia relief. The reference
point is used for rigid body rotation calculation
and these rigid body modes are part of the
equations used in the calculation of inertia
relief.Figure 1.
Theory
For static analysis of structures with rigid
body modes, inertia relief calculations can be
included in the solution process. In particular,
structures with non-structural masses may be
significantly influenced by inertia relief
effects. PARAM,INREL,-1 or
PARAM,INREL,-2 can be used to
allow the inclusion of inertia relief
calculations.
Inertia relief forces are calculated based on
the rigid body modes and the global mass matrix of
the model. The corrected load vector, is calculated
as:
Where,
Load vector
Global mass matrix
The set of all the rigid body modes that
satisfy the boundary conditions on the model
Reduced displacement vector
The value of is calculated
as:
Where,
Reduced mass matrix
Reduced load vector
PARAM,INREL,-1 or a
Constrained Structure using
PARAM,INREL,-2:
If
PARAM,INREL,-1 is set or for
PARAM,INREL,-2, if the
structure is constrained in any way, the static
analysis solution under inertia relief
uses:
Where, is calculated using
the original stiffness matrix (), plus constraints at
the SUPORT degrees of freedom to render the
displacements at the SUPORTs to be zero. SUPORT
degrees of freedom are specified by you (for
PARAM,INREL,-1) or
automatically generated by OptiStruct (for
PARAM,INREL,-2).
PARAM,INREL,-2 for a Free-Free
Structure:
When
PARAM,INREL,-2 is used for a
Free-Free structure, an alternative method is used
by default. In this method, OptiStruct imposes MPCs instead
of automatically generating SUPORT degrees of
freedom. This modifies the equation as:
Equation 4 is
a combination of and and the additional
requirement that the inertia-relieved displacement
be orthogonal to the rigid body modes (). Subsequently, this
MPC augmentation has been further modified as
(ignores equation ):