Torus
Visualizing a torus
![]()
Library
Modelica/Mechanics/MultiBody/Visualizers
Description
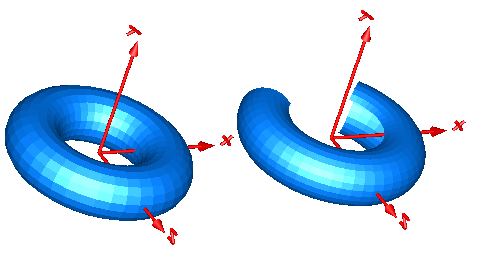
Model Torus visualizes a torus. The center of the torus is located at connector frame_a (visualized by the red coordinate system in the figure below). The left image below shows a torus with ri=0.5 m and ro = 0.2 m. The right images below shows the torus with the additional parameter settings:
opening = 45 degree startAngle = -135 degree stopAngle = 135 degree
In the advanced menu the discretization of the surface visualization can be defined by the number of points of the inner radius of the torus (n_ri) and by the number of points of the outer radius of the torus (n_ro). In case the torus is closed (that is, opening = 0 degree), the actual number of points is one less (that is n_ri-1, n_ro-1), because the first and the last point of the parametrization coincide in this case.
Parameters

| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_animation | animation | = true, if animation shall be enabled | Scalar | true |
mo_ri | ri | Major radius (distance from center of torus to center of tube) | Scalar | |
mo_ro | ro | Minor radius (radius of tube) | Scalar | |
mo_opening | opening | Opening angle of torus | Scalar | |
mo_startAngle | startAngle | Start angle of torus slice | Scalar | |
mo_stopAngle | stopAngle | End angle of torus slice | Scalar | |
mo_wireframe | wireframe | = true: 3D model will be displayed without faces | Scalar | true |
mo_color | color | Color of surface | Vector of size 3 | |
mo_specularCoefficient | specularCoefficient | Reflection of ambient light (= 0: light is completely absorbed) | Scalar | |
mo_transparency | transparency | Transparency of shape: 0 (= opaque) ... 1 (= fully transparent) | Scalar |

| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_n_ri | n_ri | Number of points along major radius ri | Scalar | |
mo_n_ro | n_ro | Number of points along minor radius ro | Scalar |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
frame_a | implicit | Coordinate system in which visualization data is resolved | input | 1 |