FixedRotation
Fixed translation followed by a fixed rotation of frame_b with respect to frame_a
![]()
Library
Modelica/Mechanics/MultiBody/Parts
Description
Component for a fixed translation and fixed rotation of frame_b with respect to frame_a, i.e., the relationship between connectors frame_a and frame_b remains constant. There are several possibilities to define the orientation of frame_b with respect to frame_a:
- Planar rotation along axis 'n' (that is fixed and resolved in frame_a) with a fixed angle 'angle'.
- Vectors n_x and n_y that are directed along the corresponding axes direction of frame_b and are resolved in frame_a (if n_y is not orthogonal to n_x, the y-axis of frame_b is selected such that it is orthogonal to n_x and in the plane of n_x and n_y).
- Sequence of three planar axes rotations. For example, "sequence = {1,2,3}" and "angles = {90, 45, -90}" means to rotate frame_a around the x axis with 90 degrees, around the new y axis with 45 degrees and around the new z axis around -90 degrees to arrive at frame_b. Note, that sequence={1,2,3} is the Cardan angle sequence and sequence = {3,1,3} is the Euler angle sequence.
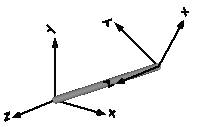
By default, this component is visualized by a cylinder connecting frame_a and frame_b, as shown in the figure below. In this figure frame_b is rotated along the z-axis of frame_a with 60 degree. Note, that the two visualized frames are not part of the component animation and that the animation may be switched off via parameter animation = false.
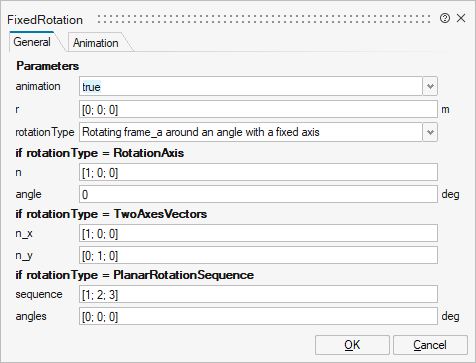
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_animation | animation | = true, if animation shall be enabled | Scalar | true |
mo_r | r | Vector from frame_a to frame_b resolved in frame_a | Vector of size 3 | |
mo_rotationType | rotationType | Type of rotation description | Structure | |
mo_rotationType/choice1 | Rotating frame_a around an angle with a fixed axis | Number | 0 | |
mo_rotationType/choice2 | Resolve two vectors of frame_b in frame_a | Number | 0 | |
mo_rotationType/choice3 | Planar rotation sequence | Number | 0 | |
mo_n | n | Axis of rotation in frame_a (= same as in frame_b) | Vector of size 3 | |
mo_angle | angle | Angle to rotate frame_a around axis n into frame_b | Scalar | |
mo_n_x | n_x | Vector along x-axis of frame_b resolved in frame_a | Vector of size 3 | |
mo_n_y | n_y | Vector along y-axis of frame_b resolved in frame_a | Vector of size 3 | |
mo_sequence | sequence | Sequence of rotations | Vector of size 3 | |
mo_angles | angles | Rotation angles around the axes defined in 'sequence' | Vector of size 3 | |
mo_R_rel | R_rel | Fixed rotation object from frame_a to frame_b | FromModelica('Modelica.Mechanics.MultiBody.Frames.Orientation') | |
mo_R_rel_inv | R_rel_inv | Inverse of R_rel (rotate from frame_b to frame_a) | FromModelica('Modelica.Mechanics.MultiBody.Frames.Orientation') |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
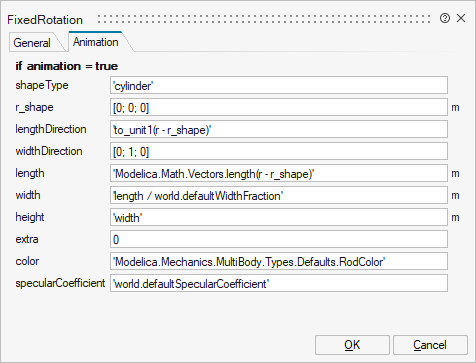
mo_shapeType | shapeType | Type of shape | String | |
mo_r_shape | r_shape | Vector from frame_a to shape origin, resolved in frame_a | Vector of size 3 | |
mo_lengthDirection | lengthDirection | Vector in length direction of shape, resolved in frame_a | Vector of size 3 | |
mo_widthDirection | widthDirection | Vector in width direction of shape, resolved in frame_a | Vector of size 3 | |
mo_length | length | Length of shape | Scalar | |
mo_width | width | Width of shape | Scalar | |
mo_height | height | Height of shape | Scalar | |
mo_extra | extra | Additional parameter depending on shapeType (see docu of Visualizers.Advanced.Shape) | Scalar | |
mo_color | color | Color of shape | Vector of size 3 | |
mo_specularCoefficient | specularCoefficient | Reflection of ambient light (= 0: light is completely absorbed) | Scalar |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
frame_a | implicit | Coordinate system fixed to the component with one cut-force and cut-torque | input | 1 |
frame_b | implicit | Coordinate system fixed to the component with one cut-force and cut-torque | output | 1 |