PI
Proportional-Integral controller
![]()
Library
Modelica/Blocks/Continuous
Description
This blocks defines the transfer function between the input u and the output y as PI system:
1
y = k * (1 + ---) * u
T*s
T*s + 1
= k * ------- * u
T*s
If you would like to be able to change easily between different
transfer functions (FirstOrder, SecondOrder, ... ) by changing
parameters, use the general model class TransferFunction
instead and model a PI SISO system with parameters
b = {k*T, k}, a = {T, 0}.
Example:
parameter: k = 0.3, T = 0.4
results in:
0.4 s + 1
y = 0.3 ----------- * u
0.4 s
It might be difficult to initialize the PI component in steady state due to the integrator part. This is discussed in the description of package Continuous.
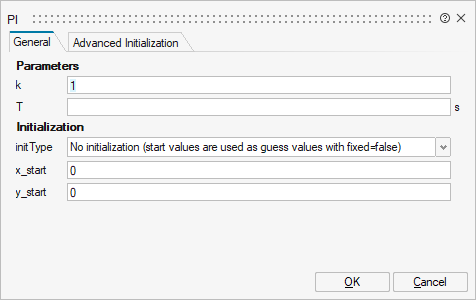
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_k | k | Gain | Scalar | |
mo_T | T | Time Constant (T>0 required) | Scalar | |
mo_initType | initType | Type of initialization (1: no init, 2: steady state, 3: initial state, 4: initial output) | Structure | |
mo_initType/choice1 | No initialization (start values are used as guess values with fixed=false) | Number | 0 | |
mo_initType/choice2 | Steady state initialization (derivatives of states are zero) | Number | 0 | |
mo_initType/choice3 | Initialization with initial states | Number | 0 | |
mo_initType/choice4 | Initialization with initial outputs (and steady state of the states if possible) | Number | 0 | |
mo_x_start | x_start | Initial or guess value of state | Scalar | |
mo_y_start | y_start | Initial value of output | Scalar |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
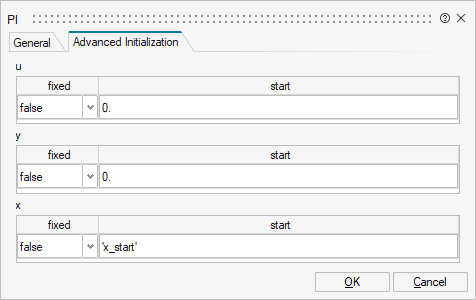
mo_u | u | u | Structure | |
mo_u/fixed | fixed | Cell of scalars | true | |
mo_u/start | start | Cell of scalars | ||
mo_y | y | y | Structure | |
mo_y/fixed | fixed | Cell of scalars | true | |
mo_y/start | start | Cell of scalars | ||
mo_x | x | x | Structure | |
mo_x/fixed | fixed | Cell of scalars | true | |
mo_x/start | start | Cell of scalars |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
u | implicit | Connector of Real input signal | input | 1 |
y | implicit | Connector of Real output signal | output | 1 |