CriticalDamping
Output the input signal filtered with an n-th order filter with critical damping
![]()
Library
Modelica/Blocks/Continuous
Description
This block defines the transfer function between the input u and the output y as an n-th order filter with critical damping characteristics and cut-off frequency f. It is implemented as a series of first order filters. This filter type is especially useful to filter the input of an inverse model, since the filter does not introduce any transients.
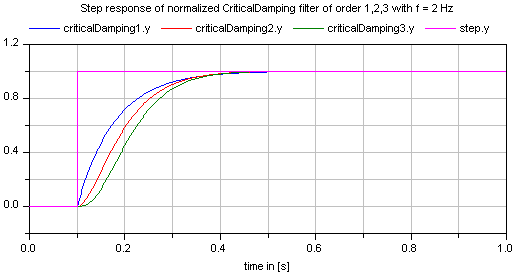
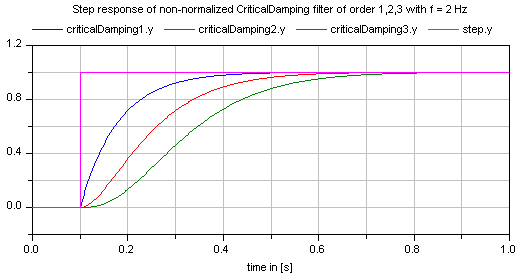
If parameter normalized = true (default), the filter is normalized such that the amplitude of the filter transfer function at the cut-off frequency f is 1/sqrt(2) (= 3 dB). Otherwise, the filter is not normalized, i.e., it is unmodified. A normalized filter is usually much better for applications, since filters of different orders are "comparable", whereas non-normalized filters usually require to adapt the cut-off frequency, when the order of the filter is changed. Figures of the filter step responses are shown below. Note, in versions before version 3.0 of the Modelica Standard library, the CriticalDamping filter was provided only in non-normalized form.
If transients at the simulation start shall be avoided, the filter should be initialized in steady state (e.g., using option initType=Modelica.Blocks.Types.Init.SteadyState).
The critical damping filter is defined as
α = if normalized then sqrt(2^(1/n) - 1) else 1 // frequency correction factor
ω = 2*π*f/α
1
y = ------------- * u
(s/w + 1)^n
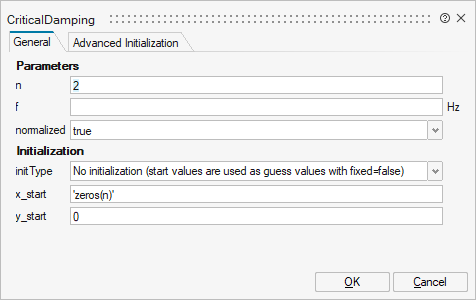
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_n | n | Order of filter | Scalar | |
mo_f | f | Cut-off frequency | Scalar | |
mo_normalized | normalized | = true, if amplitude at f_cut is 3 dB, otherwise unmodified filter | Scalar | true |
mo_initType | initType | Type of initialization (1: no init, 2: steady state, 3: initial state, 4: initial output) | Structure | |
mo_initType/choice1 | No initialization (start values are used as guess values with fixed=false) | Number | 0 | |
mo_initType/choice2 | Steady state initialization (derivatives of states are zero) | Number | 0 | |
mo_initType/choice3 | Initialization with initial states | Number | 0 | |
mo_initType/choice4 | Initialization with initial outputs (and steady state of the states if possible) | Number | 0 | |
mo_x_start | x_start | Initial or guess values of states | Vector | |
mo_y_start | y_start | Initial value of output (remaining states are in steady state) | Scalar | |
mo_alpha | alpha | Frequency correction factor for normalized filter | Scalar | |
mo_w | w | Scalar |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
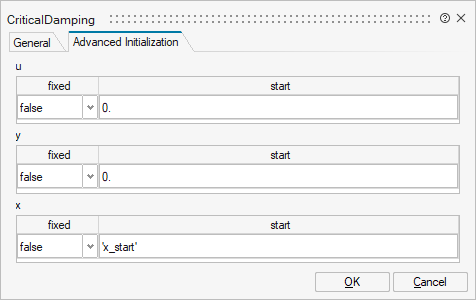
mo_u | u | u | Structure | |
mo_u/fixed | fixed | Cell of scalars | true | |
mo_u/start | start | Cell of scalars | ||
mo_y | y | y | Structure | |
mo_y/fixed | fixed | Cell of scalars | true | |
mo_y/start | start | Cell of scalars | ||
mo_x | x | x | Structure | |
mo_x/fixed | fixed | Cell of vectors | true | |
mo_x/start | start | Cell of vectors |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
u | implicit | Connector of Real input signal | input | 1 |
y | implicit | Connector of Real output signal | output | 1 |