Integral
This block implements an integrator. The output is the integral of the input signal.
![]()
Library
Activate/Dynamical
Description
The dynamics of the integral block is defined by
dx/dt = u
y = x , x(t0)=x0,
where u, x, y, and x0 are the block input, block state, block output and block initial state values respectively.
dx/dt is the state derivative with respect to time.
Input data type can be double or complex and input can be scalar, vector or matrix.
Example: Bouncing ball
Consider the bouncing ball example with the following model


whenever the ball hits the ground the ball speed changes as follows:



As shown in the figure, two integral blocks are used to model the bouncing ball, one for the h and one for v. The state size pf the model is two and integral blocks are initialized to h0 and 0.0 respectively. A zero crossing block has been used to trigger an event whenever the value of h becomes negative. At the event time the second integrator (v) is reset to new values defined by -0.9*V(hit).
More complex examples are given in the Activate Documentation, such as the Kalmen filter example section.
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
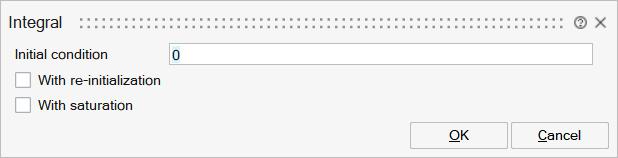
x0 | Initial condition | Defines the initial state of the integrator, which can be a real or complex matrix. If the initial value is scalar and the input is not scalar (vector or matrix), the initial value is expanded automatically to match the internal state size. | Matrix | |
reinit | With re-initialization | Sets the state to the specified initial condition based on an external signal. If the new state is a function of the previous state (the value just before the reinitialization event), a Lastinput block connected to the integral block output may be used. | Number | 0 |
satur | With saturation | Limits the states to a value between the Lower saturation limit and Upper saturation limit parameters. | Number | 0 |
limit | Saturation limit | Structure | ||
limit/max | Upper limit | Real value and is active only if the With Saturation parameter is active. If active, the state value will not exceed this limit. | Cell of matrices | |
limit/min | Lower limit | Real value and is active only if the With Saturation parameter is active. If active, the state value will not be lower than this limit. | Cell of matrices | |
limit/zcross | Enable zero-crossing | Detects the zero crossings. Default is Off. Active only if the With Saturation parameter is active. Helps to get more precise values at discontinuities. | Cell of numbers | 0 |
saturationstatus | Saturation status | If selected, a second output indicates if the integrator is saturated. The output is 1 if the integrator output reaches the upper limit. The output is -1 if the integrator output reaches the lower limit. The output is 0 if the integrator output is not saturated. | Number | 0 |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
Port 1 | explicit | output | 1+saturationstatus*satur | |
Port 2 | explicit | input | 1 | |
Port 3 | explicit | input | reinit | |
Port 4 | activation | input | reinit |
Advanced Properties
| Name | Value | Description |
|---|---|---|
always active | yes | |
direct-feedthrough | yes | The feedthrough property of the second input (if present) is always true. |
zero-crossing | yes | When Saturation option is checked. |
mode | yes | When Saturation option is checked and the solver is variable-step. |
continuous-time state | yes | |
discrete-time state | no |